Пошаговая инструкция
Итак, как сделать пылесос из бутылки? Для этого нужно четко представлять, как выглядит устройство прибора и как он работает. Берём пластиковую бутылку неправильной формы и отрезаем от неё горлышко в том месте, где оно расширяется. У нас должно получиться что-то вроде крышки, которую можно плотно вставить обратно.
Затем от среза горлышка отмеряем лишнюю часть и отрезаем её с таким расчётом, чтобы оставшегося объёма хватило под пылесборник и размещение мотора.
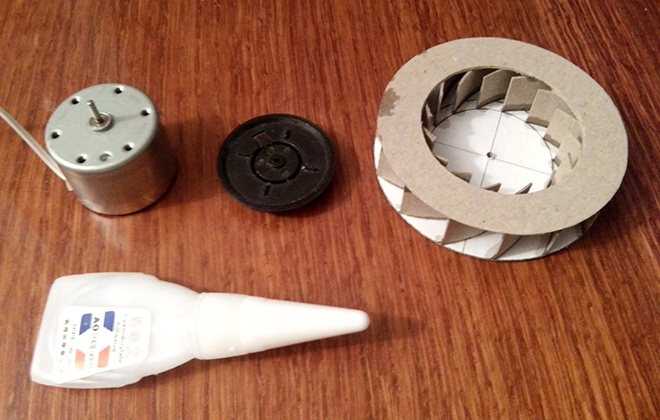
Для изготовления вентилятора нам подойдет любой кусок мягкого металла подходящего размера. Это может быть донышко банки, жестяная крышка или что-то, что можно легко разрезать ножницами, а затем изогнуть. Идеально, если нам повезёт найти уже готовый пропеллер от какой-нибудь игрушки.
Вырезаем из жестянки круг и размечаем его на восемь равных частей. Далее по линиям разметки делаем надрезы ножницами, оставляя около 5-10 мм до центра окружности.
В центре проделываем отверстие под ротор моторчика, а лопасти крыльчатки слегка сгибаем под углом так, чтобы они всасывали воздух во время вращения, а не наоборот.
Скрепляем вместе вентилятор и ротор электромотора термоклеем или иным способом, стараясь не допускать при этом перекосов в соединении.
В донышке проделываем отверстия для выхода воздушного потока, просто срезав выступающие края донышка канцелярским ножом.
Затем нужно к внутренней стороне донышка прикрепить электромотор. Для этого нам пригодится любая пластмассовая крышка. Главное, чтобы её размер примерно совпадал с размерами моторчика.
Это нужно, чтобы надёжно приклеить электромотор к донышку бутылки с помощью термоклея.
Самодельный пылесос почти готов, осталось сделать фильтр, который будет отделять электромотор от отсека для сбора пыли. Для этого мы используем мелкую сетку, которую натянем на капроновую стяжку или проволоку, согнутую в круг.
Если изготовленный фильтр плотно вставляется в наш самодельный пылесос без дополнительных креплений, то можно всё так и оставить. В противном случае нужно закрепить его на держателях, в качестве которых можно использовать канцелярские кнопки. Последние нужно воткнуть в бутылку по окружности в месте крепления фильтра и обмотать их снаружи клейкой лентой.
Для изготовления шланга мы используем трубку диаметром чуть меньше горлышка бутылки. На конец трубки можно намотать несколько слоёв медицинского пластыря, чтобы трубка плотно входила в горлышко и не выскальзывала из него.
Всасывающие насадки можно изготовить из чего угодно: из шариковой ручки, трубки от капельницы, шприца, пластмассового флакона – в зависимости от их назначения. Можно даже использовать маленькие сменные насадки от настоящего пылесоса, если они подойдут.
Теперь останется только решить вопрос с питанием электромотора, а именно: подсоединить к нему проводами выключатель и источник питания, в качестве которого могут служить батарейки, аккумулятор или сетевой адаптер.
После этого наш самодельный пылесос готов к использованию!
Робот из спичечных коробков
Симпатичную поделку в виде робота можно выполнить, взяв за основу коробки от спичек.
Зная, как сделать поделку робот, следует подготовить следующие материалы:
- 9 спичечных коробков;
- цветная бумага;
- клей.
Первый делом нужно наклеить цветную бумагу на 5 спичечных коробков (ручки, туловище и голова). На голове из коробка сделать очертания лица используя чёрный маркер.
Остальные четыре спичечных коробка необходимо склеить, а верхнюю часть оклеить любой цветной бумагой.
После сбора всего робота, украсьте его по своему усмотрению. На голове можно приделать аннтенки из спичек. Туловище робота можно приукрасить, наклеив дополнительные частицы.
Подготовка к практической реализации проекта
Рассмотрим применение описанных выше принципов к платформе Arduino Mega 2560. Процесс строительства состоит из нескольких этапов:
- Подготовка инструментов и материалов,
- Подготовка и заготовка материалов, подготовка инструментов и оборудования, строительство корпуса с колесами и отсеком для отходов, пылесборника и турбины,
- установка датчиков и микроконтроллера, двигателей с редукторами, аккумулятора, щеток,
- выполнение электрических соединений,
- Ввод программы в Arduino, определение согласованности датчиков,
- Проверка функциональности робота-пылесоса и его способности к самозарядке.
Концепция реализуется с использованием следующих материалов и инструментов:
- Контроллер Arduino — 1 штука, с драйверами,
- Фанерный лист (или картон) — 1 м2,
- картон (картон, картонная коробка, картонная коробка, картонная коробка, картонная коробка, картонная коробка — 3 шт,
- Источник питания — 4 батареи 18 В, индикатор заряда для них, зарядное устройство,
- инфракрасные датчики — 4 шт, контактные датчики — 2 шт,
- Моторы: 1 шт. для турбины и 1 шт. для щетки; 2 мотор-редуктора обеспечивают движение,
- корпус из поливинилхлорида — 1 шт,
- клей — 1 упаковка, саморезы — 10 штук, клейкая лента — 1 штука, набор магнитов,
- набор отверток и бит, плоскогубцы, кусачки, карандаш, линейка, шуруповерт, лобзик.
- Автомобильный пылесос, как следует из названия, предназначен для уборки салона автомобиля. Его компактные размеры обеспечивают доступ в самые труднодоступные места. Некоторые пылесосы могут всасывать жидкости, что особенно полезно зимой, когда на ковре стоят лужи талого снега.
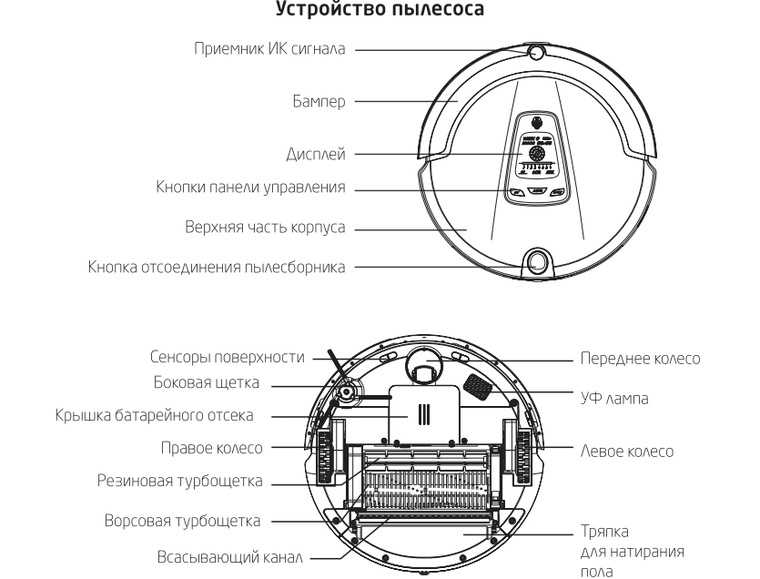
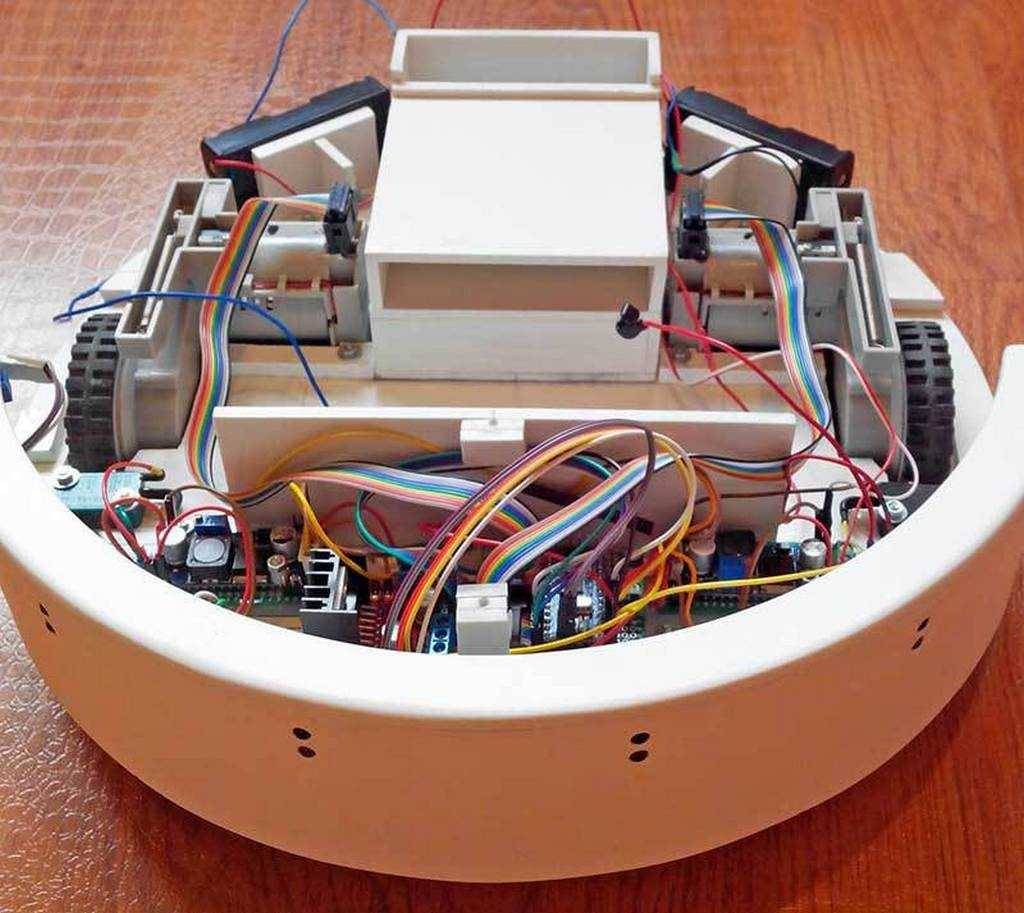
Описание самодельного робота пылесоса
Если вы все сделаете правильно, у вас получится модель, соответствующая этому описанию:
- диаметр устройства составляет 30 сантиметров, высота – 9 сантиметров. Корпус сделан из вспененного поливинилхлорида. При этом толщина самого корпуса достигает 6 миллиметров;
- в бампере установлены 4 датчика, посредством которых будет фиксироваться положение робота-пылесоса в пространстве. При этом имеется пара переключателей, подсоединенных на случай непредвиденных столкновений. Края обиты резиновой прокладкой, чтобы при случайном столкновении с мебелью не повредить ее;
- емкость для пыли и мусора изготовлена из поливинилхлорида толщиной в 4 миллиметра. Фильтр для пыли изготовлен из 2 обыкновенных тряпичных салфеток, которые можно купить в каком угодно бытовом магазине. Крышка, защищающая содержимое мусорного контейнера, прикреплена к основанию при помощи магнитов;
- турбина изготовлена из тонких пластиковых листов, фрагментов компьютерных дисков и поливинилхлорида;
- верхняя крышка устройства держится на суперклее;

Самодельный робот-пылесос
- инфракрасные датчики имеют 4 выхода подключения к системе «Ардуино». При этом обычный режим работы подразумевает выдачу логической единицы, а ситуация, в которой хотя бы один из датчиков системы срабатывает — логический ноль;
- если ИК-датчик не сработал, а пылесос тем не менее наткнулся на какое-либо препятствие, его бампер нажмет на переключатель, что спровоцирует откат устройства на несколько сантиметров назад. После этого будет произведен разворот, а работа продолжится. Переключатели при этом нужны достаточно мощные, чтобы своевременно устанавливать бампер в исходное положение;
- мотор, отвечающий за движение передней щетки, подключается в Arduino через MOSFET. При этом в том случае, когда робот-пылесос находится в движении, щетка вращается достаточно медленно для того, чтобы пыль, грязь и мусор не разбрасывались по комнате, а, наоборот, собирались вместе и втягивались в жерло. А если робот находится возле стены или угла, щетка ускоряет темп своей работы, так как большинство пыли и грязи как раз и скапливается вдоль плинтусов;
- питание робота пылесоса осуществляют 4 литийионных аккумулятора, а также понижающий преобразователь переменного тока. Каждая пара вышеупомянутых литийионных аккумуляторов подключена последовательно;
- основание устройства изготовлено из высокопрочной фанеры;
- конструкция устройства подразумевает наличие 3 шариковых колес;
- все щетки робота-пылесоса изготовлены из достаточно жесткой лески.








Требуемые компоненты
Для сборки пылесоса на Ардуино потребуются компоненты:
- блок управления;
- отдельный контроллер для управления работой электродвигателей (обозначается на схемах как H-Bridge);
- электрические двигатели постоянного тока с редукторами для привода боковых колес;
- комплект колес;
- источник питания (аккумуляторы или батарейки, суммарное напряжение 5 В);
- турбина (используется узел, предназначенный для охлаждения процессоров или чипов видеокарт);
- адаптер питания (при использовании компонентов, рассчитанных на напряжение 12 В);
- комплект магнитов;
- коммутационный шнур USB;
- комплект кабелей для подключения блока Ардуино к цепям оборудования;
- листовой плотный картон;
- термический клей в тубе;
- пистолет для нанесения клея;
- резервуар для сбора пыли (готовый пластиковый или металлический контейнер);
- пластиковые хомуты;
- металлическая банка от напитков (для изготовления крепежных элементов).
Необходимые инструменты и материалы
Для изготовления самодельной конструкции требуются материалы и набор инструментов. Они следующие:
Контролер типа Arduino с соответствующими драйверами. Этот элемент можно приобрести в специализированном магазине. Контроллер после установки рекомендуется защитить от воздействия окружающей среды.
Лист фанеры применяется для создания основания. В некоторых случаях изготавливается корпус из поливинилхлорида, т. к. этот материал более надежный в применении.
Для обеспечения подвижности устанавливается 3 колеса. Они должны быть небольшого размера, поверхность изготавливается из материала с высокой степенью сцепления.
Провода сечением 0,75 мм² нужны для соединения отдельных элементов. Компактность конструкции определяет то, что требуется относительно небольшое количество провода.
Блок питания представлен 4 аккумуляторами по 18V
Также уделяется внимание тому, какие используются зарядные устройства. На момент работы источник питания может нагреваться до высокой температуры. Поэтому батареи должны быть изолированы от других материалов.
4 инфракрасных и 2 контактных датчика используются для определения положения устройства
Инфракрасные размещаются по периметру, контактные располагаются внутри бампера.
Клей, саморезы и другие крепежные элементы.
Набор отверток, паяльник, нож, карандаш, шуруповерт и некоторые другие инструменты.
Поэтому батареи должны быть изолированы от других материалов.
4 инфракрасных и 2 контактных датчика используются для определения положения устройства. Инфракрасные размещаются по периметру, контактные располагаются внутри бампера.
Клей, саморезы и другие крепежные элементы.
Набор отверток, паяльник, нож, карандаш, шуруповерт и некоторые другие инструменты.
Картонный элемент изготавливается для получения основания. Щетки по бокам существенно повышают эффективность создаваемого устройства,
Как сделать микроволновку для куклы своими руками?
 Принятие пищи в кукольном мире занимает не самое последнее место. Кукла должна где-то готовить и разогревать свою кукольную еду из пластилина или полимерной глины.
Принятие пищи в кукольном мире занимает не самое последнее место. Кукла должна где-то готовить и разогревать свою кукольную еду из пластилина или полимерной глины.
Очень удобная и многофункциональная микроволновка для куклы может получиться из обычной точилки. Выбирайте точилки, в которых есть отделение для сбора опилок. Используя декоративную клейкую бумагу оклейте точилку в нужный вам цвет – белый, черный или металлический (для более реалистичного внешнего вида).
 Кнопочки можно сделать из обычного пластилина или же приклеить бусинки, ненужные детальки от сломанных ручек или фломастеров.
Кнопочки можно сделать из обычного пластилина или же приклеить бусинки, ненужные детальки от сломанных ручек или фломастеров.
Простейшая модель пылесоса
Для тех, кто сильно не любит возиться с самоделками, предлагается простейший вариант пылесоса. В общих чертах прибор состоит из пластиковой бутылки. На горлышке надет шланг для всасывания мусора. Внутри емкости к донышку закреплен моторчик с лопастями. Между вентилятором и входным отверстием установлен фильтр.
Из материалов понадобится ПЭТ бутылка емкостью 1–1,5 л, кусок гофрированного шланга, медная проволока, капроновый чулок, батарейки и многожильный провод. Моторчик можно взять из детской игрушки, но они обычно слабые. Чтобы пылесос хорошо всасывал мусор, двигатель лучше демонтировать с поломанного магнитофона или другого электроприбора.
Инструкция по сборке пылесоса состоит из следующих шагов:
Изготовление самоделки начинают с корпуса. Бутылку берут из-под напитка Sprite. Выбор обусловлен неправильной формой емкости, внутри которой удобнее размещать детали. На участке расширения бутылку перерезают острым ножом. Из верхушки получится крышка.
Вторая часть бутылки идет немного на сужение, а возле донышка сильно расширяется. От места среза нужно произвольно отрезать неширокую полосу. Суженая часть легко войдет внутрь крышки.
Корпус откладывают в сторону и приступают к изготовлению вентилятора. Прочный и легкий пропеллер получится из жестяной банки для пива или напитков. Ножницами отрезают дно и верхнюю часть. Получившийся цилиндр разрезают вдоль, разгибают и выравнивают, чтобы получился прямоугольный кусок жести.
На заготовке циркулем рисуют круг. Диаметр пропеллера и внутренней части бутылки возле донышка должны почти совпадать. Для зазора оставляют 2–3 мм, чтобы лопасти не цепляли стенки.
Ножницами из жести вырезают круг. Заготовку расчерчивают карандашом, разделив на 8 одинаковых треугольников. По линиям делают надрезы, не доходя до центра 10 мм.
Разрезанные сегменты подгибают под углом. Лопасти при вращении должны втягивать воздух, а не выталкивать. В какую сторону выгибать лепестки, зависит от направления вращения вала мотора. Все можно испытать опытным путем. Если вентилятор выталкивает воздух, лепестки легко можно перегнуть в обратную сторону.








По центру пропеллера шилом прокалывают отверстие. Крыльчатку насаживают на вал моторчика, фиксируют термоклеем или винтом, если имеется резьба.
Во время работы вентилятора со стороны донышка бутылки должен выходить воздух. Отверстия прожигают паяльником, просверливают или вырезают ножом.
Заднюю часть моторчика помещают в пластмассовую пробку. Сбоку выводят провода. Моторчик к пробке приклеивают или прикручивают болтиками, если на корпусе есть отверстия с резьбой.
С помощью горячего пистолета пластиковую крышку с мотором приклеивают к внутренней части донышка бутылки. Двигатель располагают строго по центру. Пробуют прокрутить вентилятор, чтобы лопасти не цепляли стенки бутылки.
Для защиты мотора от пыли изготавливают фильтр. Из толстой медной проволоки выгибают кольцо по диаметру бутылки. На каркас натягивают кусок капронового чулка.
Фильтр вставляют внутрь бутылки перед мотором. Кольцо должно войти плотно. С обеих сторон фильтра стенку емкости прокалывают канцелярскими кнопками. Ограничители предотвратят смещение кольца. Чтобы кнопки не выпали, участок бутылки обматывают изолентой или скотчем.
На горлышко второй части бутылки надевают всасывающий шланг. Его можно сделать из куска пластиковой гофры для прокладки электропроводки. Соединение шланга с горлышком плотно обматывают изолентой. Рабочие насадки изготавливают из любых пластиковых трубочек.
Две части пылесоса сделаны и их осталось соединить. Провода от электромотора выводят через вентиляционное отверстие на донышке. Подключать можно к блоку питания, но тягать провода за пылесосом неудобно. К внешней части донышка лучше приклеить пластиковый отсек для батареек. Мобильный пылесос можно будет брать с собой в дорогу.
Схема сборки робота-пылесоса в домашних условиях
Чтобы правильно сделать робот-пылесос своими руками, необходимо придерживаться следующего алгоритма (схема должна выполняться в четко указанной последовательности):
- Загрузить необходимое программное обеспечение. Если вы хотите сделать свой робот-пылесос максимально похожим на заводские аналоги (исходя из выполняемых функций), вам нужно будет загрузить на микроконтроллер «Ардуино» необходимое программное обеспечение. Это можно сделать при помощи обыкновенного персонального компьютера — достаточно лишь загрузить код на плату «Ардуино».
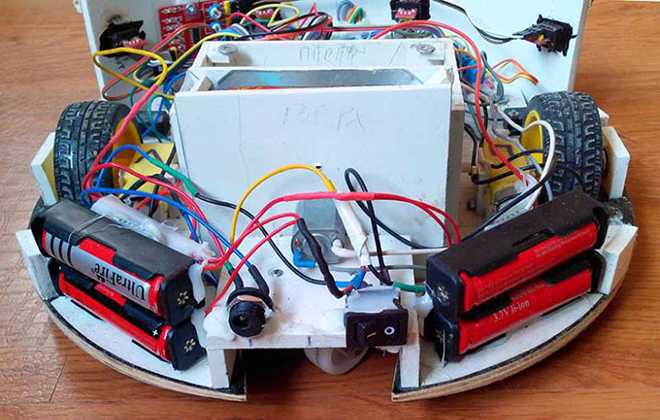
- Закрепить основные компоненты. Чтобы средства передвижения робота-пылесоса, кулер, микросхемы, аккумуляторы и вся прочая начинка устройства были надежно закреплены, вам потребуется фанерная основа. Она же по совместительству будет днищем вашего пылесоса. Туда же крепятся предварительно склеенные между собой при помощи суперклея турбина и емкость для сбора отходов. Также контейнер должен быть оборудован специальной трубкой, через которую будет выводиться выдуваемый воздух. Она должна быть защищена плотной тканью, которая послужит средством фильтрации. Кулер должен быть последовательно склеен со всеми сервоприводами, после чего посажен на все ту же фанерную площадку, на которой к тому времени уже должны быть монтированы микросхемы и аккумуляторы для подпитки устройства. Колеса для робота пылесоса могут быть куплены на рынке (однако вы можете предпринять попытку сделать их своими руками из консервной банки).

Механическая часть робота-пылесоса
- Установить бампер. В этой модели он изготавливается из поливинилхлорида. Однако возможны и металлические аналоги. В любом случае при столкновении он должен физически воздействовать на переключатель, который заставит аппарат двигаться в другую сторону. Также стоит отметить, что после столкновения бампер должен возвращаться на первоначальное место.
- Установить корпус. Чтобы все содержимое конструкции было надежно защищено, лучше всего использовать корпус из поливинилхлорида. При этом на нем можно сделать надрезы, чтобы он лучше снимался. Крышка корпуса крепится при помощи магнитов. В идеале их должно быть не менее 8 (приветствуются вариации, в которых использовано большее их количество).
Изготовление робота-пылесоса в домашних условиях
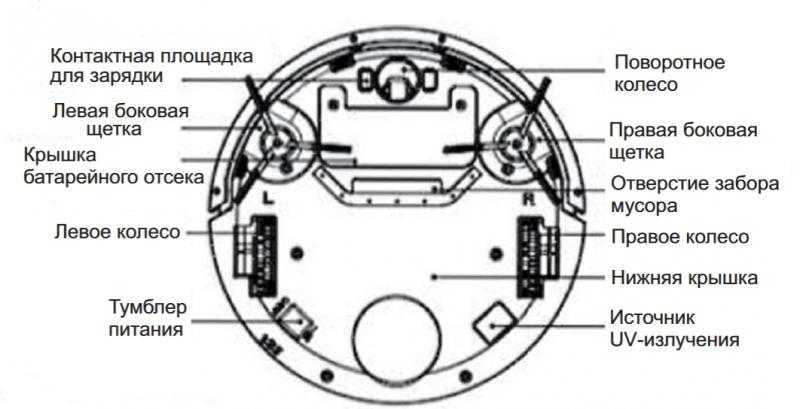
Описание и назначение
Производители таких устройств оснащают свои изделия разными функциями. Это помогает сделать их работу более качественной. Для улучшения эксплуатационных характеристик используется виртуальная стена.
Под этим термином понимают особое приспособление, которое помогает пылесосу ориентироваться в комнате. Устройство дает возможность разделять помещение на зоны. Благодаря его использованию робот не сможет покинуть комнату, в которой проводится уборка. Виртуальная стена используется при потребности в ограничении доступа прибора к хрупким предметам. Это может быть напольная ваза или посуда с кормом домашних питомцев. В подобных ситуациях приспособление будет очень актуальным.
Что пригодится для сборки?
Перед тем как самостоятельно изготовить автоматизированную технику следует обзавестись всеми нужными материалами и схемой сборки. В интернете есть достаточно много видео, обучающее робототехники. Рассмотрим подробнее список необходимых материалов, и как все-таки собрать агрегат самостоятельно.
Материалы необходимые для самостоятельной сборки пылесоса:
- мозг системы;
- 4 ИК, для обнаружения препятствий на воем пути;
- 2-3 вращающих аксессуара;
- переключатели, которые необходимы для изменения траектории движения во время столкновения;
- модель для контроля движения передней щетки;
- преобразователь тока;
- драйвер моторов;
- мотор, отвечающий за вращение щетки;
- редуктор;
- Li ion блок;
- изготовленный корпус робота;
- основание из фанеры;
- несколько магнитов, обеспечивающих крепление;
- клей, саморезы;
- провода, переключатели, кабели и т.д.
Схема
Для того, чтобы сделать робот, который ничем не будет отличаться от промышленной модели. Процесс программирования производится через ПК, следует загрузить код на плату. Существует большое множество различных планов роботизированной модели. Схема робота пылесоса: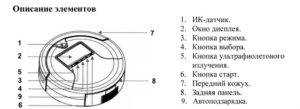
- Берем основание из фанеры, к нему крепим с помощью клея — двигатель, пылесборник, кулер, микросхема, аккумулятор, ИК лазеры передвижения. Стоит не забывать что у пылесборника должна быть трубка, позволяющая воздуху выйти наружу. Колеса решили взять уже готовые, то просто крепим к основанию.
- Установить бампер. Его можно сделать из металлического материла, главным критерием является воздействие контактного аксессуара на переключатель, заставляющий двигаться его назад, в противоположную сторону от препятствия.
- Далее устанавливаем корпус, следует заметить, что корпус крепится с помощью магнитов. Чем выше количество используемых магнитов, тем прочнее корпус будет держаться. Лучше всего подойдет корпус из поливинилхлорида.
Подробнее о процессе сборки
Теперь детально рассмотрим проект сборки:
- Корпус изготавливается из картона, либо поливинилхлорида.
- Закрепляем на корпусе ИК лазеры и контактный аксессуар;
- Пылесборник изготавливается из картона или поливинилхлорида;
- Для фильтра подойдут тканевые или микрофибровые салфетки;
- Двигатель подключается к ардуино;
- ИК аксессуары подключаются к контроллеру;
- Устанавливаются батареи;
- Устанавливаем щетки;
- Далее следует процесс программирование;
- Устанавливаем верхнюю крышку и проверяем целостность робота.
3 Большое количество мебели
Уборка комнат, в которых расположено слишком много мебели, особенно стульев, может оказаться слишком сложной для роботов-пылесосов. Большое количество препятствий создает проблемы даже для моделей с лазерными или оптическими датчиками.
Дело в том, что даже самый компактный робот-пылесос представляет собой впечатляющих размеров «шайбу». Он просто не может пролезть между ножек стульев, да и кресло на колесах не позволит ему убраться под столом. Это может показаться странным, но дорогие роботы убираются не лучше. На их верхней крышке часто расположена башенка лидара, которая добавляет полтора-два сантиметра к высоте устройства. В результате оно просто не помешается под диван или шкаф, пространство под мебелью останется в нетронутом виде.
Если мебели много, быстрее, проще и качественнее убираться с помощью беспроводных моделей.
Теория
Самодельный робот-пылесос должен соответствовать различным требованиям. Основными можно назвать:
- Рекомендуется изготавливать конструкцию в форме небольшого цилиндра. Она исключает вероятность того, что устройство зацепится за различные объекты в помещении.
- Устройство должно разворачиваться на одном месте. Для этого нужно сделать колеса по периметру: 2 ведущих и 1 управляющий.
- Внутри конструкции должен располагаться приемник для мусора. Его форма и крепление должны обеспечивать легкое извлечение. При изготовлении контейнера часто применяется картон, верхняя крышка крепится магнитами. Предусматривается наличие фильтрующего элемента.
- Контактный бампер требуется для защиты пылесоса от ударов. Внутри этого элемента располагается датчик, срабатывающий при соприкосновении. Бампер изготавливается из поливинилхлорида, с наружной части может крепиться упругий материал.
- По периметру размещены ИК-датчики. Они предназначены для определения препятствий на пути.
- Зарядка устройства должна проводиться без разбора конструкции. Контроллер заряда позволяет исключить вероятность повреждения аккумулятора.
- Наилучшим местом для размещения центра тяжести являются колеса.
- Больше всего внимания уделяется выбору требуемого мотора. Он должен потреблять небольшое количество энергии, быть надежным.

Создать подобную конструкцию можно самостоятельно. Процесс делиться на несколько основных этапов:
- Подготовка требующихся материалов и инструментов.
- Изготовление основных частей.
- Монтаж датчиков, мотора, аккумулятора и других элементов.
- Выполняется электрическое подключение.
- Вводится требуемая программа, согласуется работа всех установленных датчиков.
Финишный этап предусматривает проверку работоспособности самодельного устройства.