

Почему ваш беспилотник может улететь
Дрон может улетать и пропасть с поля зрения по разным причинам, одна из основных – невнимательно прочитанная инструкция. Остаться без него можно, если он сам потеряет сигнал со спутниками GPS. Это может случиться, в том случае, когда беспилотник будет лететь близко с местом с сильным электромагнитным излучением, а также если при передаче сигнала из-за помех случится сбой.
К проблеме приведет и неисправная батарея пульта управления. При низком заряде бортового аккумулятора начнут мерцать маршрутные огни, а динамик пульта дистанционного управления будет издавать сигнал тревоги. Оператор в течение нескольких минут может вернуть и приземлить аппарат. Если человек не среагирует, коптер постарается сам долететь до места взлета. Но может так случиться, что он упадёт там, где у него появились проблемы.
Другие причины не прилета аппарата:
- ошибки при пилотировании;
- не срабатывание кнопки RTH;
- потеря связи в результате значительного расстояния между передатчиком и приемником;
- факторы окружающей среды (ветер, осадки, температура минус 20-30 градусов).
Некоторые операторы считают, что успеют увернуть беспилотный летательный аппарат от препятствий, которые могут неожиданно появиться на пути. Но если этого сделать не получится, коптер окажется на земле. Опасность заключается в том, что такое может случиться в тот момент, когда техника находится на далеком расстоянии и разыскать ее будет сложно.
 Найти потерявшийся дрон можно несколькими способами
Найти потерявшийся дрон можно несколькими способами
Проверяем цепь питания и выявляем проблему
Иногда проблема может лежать на поверхности и решение будет простым.
Проверьте питание ESC (регуляторов оборотов)
Идет ли питание на регуляторы оборотов? Это можно проверить с помощью мультиметра и подключенного аккумулятора к квадрокоптеру.
Послушайте какие звуки издает неработающий мотор
Когда вы включаете (подсоединяете аккумулятор) квадрокоптер, моторы проигрывают стартовые звуки, они настраиваются при прошивке в BL_Helli, подробнее ниже:
Как только вы подключите аккумулятор, проиграет мелодия, которую вы выбрали при прошивке, а после этого будет 3 коротких сигнала «пи-пи-пи». Это значит, что ESC (регуляторы оборотов) и моторы получают питание.
Пару секунд спустя, должны издаться еще 2 сигнала, но уже более длинных — «пииии-пииии», это значит, что ESC получают корректный сигнал газа от полетного контроллера.
Если вы слышите только первые 3 коротких сигнала, но не услышали вторые 2 сигнала, значит проблема с полетным контроллером, а это скорее всего уже проблема с выходами на портах.
Что нужно проверить:
- Цел ли сигнальный провод двигателя?
- Не замкнут ли контакт двигателя, который расположен на полетном двигателе, на землю? Для проверки возьмите мультиметр и в режиме прозвонки, проверьте контакт.
Полеты
Дроны могут улететь по целому ряду причин. Основной причиной улета является ошибка пилота, когда он не установил GPS-координаты возврата к дому или высоту возврата к дому. Они также могут быть вызваны выходом за пределы прямой видимости, а в редких случаях может произойти ошибка компаса или GPS.
Если вы хотите узнать больше о том, почему ваш дрон улетает, вы можете ознакомиться с другой моей статьей, где я рассказываю обо всем, что вам нужно знать — нажмите здесь, чтобы перейти к полной подробной статье.
В исследовании 2016 года основное внимание уделялось интерфейсу управления дроном, а также тому, как сделать полет дрона безопасным. Исследователи обнаружили, что внешние пилоты считаются одной из основных причин частых аварий с беспилотниками
Подтверждением тому служит тот факт, что внешние пилоты являются одной из основных причин частых аварий с дронами.
Это связано с тем, что внешние пилоты вызывают проблемы несоосности из-за разных перспектив между пилотами дронов и беспилотниками. Согласно другому исследованию 2004 года, на неправильное использование приходится до 32% всех инцидентов с беспилотниками
Вот почему так важно освоить все навыки полета вашего дрона и заблаговременно развить уверенность и способности
К распространенным причинам вылета относятся:
- не включена функция возврата к дому
- установка неподходящей высоты возврата к дому
- помехи компаса
- вылет за пределы прямой видимости
- неподходящее местоположение GPS точки возврата к дому
- потеря сигнала GPS
- и многое другое.
Другие проблемы
Акселерометр
Квадрокоптер может находиться на неровной поверхности, либо акселерометр не откалиброван. Попробуйте откалибровать датчик на ровной поверхности и взлетать пробуйте тоже с ровной поверхности. Если это не помогло, попробуйте увеличить в CLI параметр small_angle degrees , по умолчанию он 25. В крайнем случае, можно отключить акселерометр, если вы не летаете в режиме стабилизации.
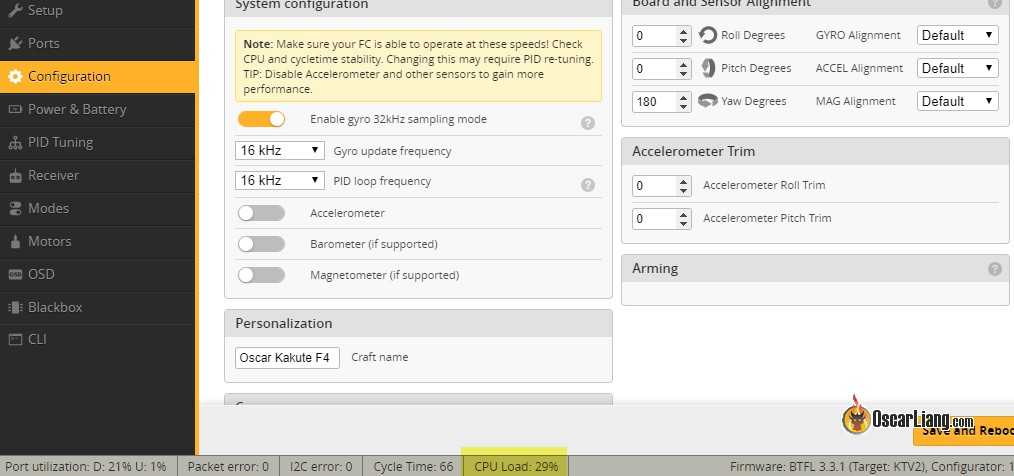
Большая загрузка процессора
Если вы включили все что нужно и ненужно, то скорее всего, процессор будет загружен на полную. Отключите лишние функции и постарайтесь добиться загрузки процессора до 50%. В противном случае, при полной загрузке полетный контроллер запретит взлет.
Газ, он же Throttle, он же дроссельная заслонка
Вам нужно проверить, какое нижнее значение у стика газа, по-хорошему, у всех каналов нижнее значение должно быть 1000, а верхнее 2000. Настройки производятся в зависимости от аппаратуры — либо в пульте, либо в конфигураторе во вкладке Configuration или Receiver. Также при подаче питания дрону, нужно убедиться, что стик газа в нижнем положении.
В прошивке Betaflight есть автоматическая защита, регулируется параметром « Min_Check», по умолчанию установлен на 1050 и, если к примеру, у вас стик газа в нижнем положении на 1060, то прошивка не даст запустить двигатели. Вам нужно настроить значения нижнего предела стика в разделах конфигурация и ресивер. Нужно добиться того, чтобы стик газа в нижнем положении показывал цифру ниже 1050.









Порог Морона
Некоторые FC могут иметь более чувствительные гироскопы, и квадрокоптер откажется запускаться после включения питания. При увеличении порога Moron в CLI может снизить чувствительность гироскопа во время инициализации. Попробуйте установить его на 100 или даже 120.
- Свежие записи
- Чем отличается двухтактный мотор от четырехтактного
- Сколько масла заливать в редуктор мотоблока
- Какие моторы бывают у стиральных машин
- Какие валы отсутствуют в двухвальной кпп
- Как снять стопорную шайбу с вала
Полет вне зоны прямой видимости
Полет вне зоны прямой видимости также вызывает огромное количество проблем у пилотов дронов.
Все мы испытывали искушение обогнуть дерево, здание, скалу или другое препятствие, но законы и правила полетов многих стран требуют, чтобы дрон постоянно находился в зоне прямой видимости пилота.
Полет вслепую означает, что вы на 100% полагаетесь на датчики дрона и систему визуального позиционирования для безопасной навигации в 3D-среде. Даже для самых опытных пилотов это очень сложная ситуация.
Некоторые дроны летают вслепую.
Некоторые дроны оснащены датчиками 360°, что означает, что они могут летать автономно даже в самых сложных условиях. Однако большинство дронов имеют датчики только для движения вперед, назад и вниз.
Вы также можете потерять контроль над своим дроном, если будете летать в очках, которые транслируют живые кадры с видом от первого лица. Использование очков для дронов означает, что вы не можете быстро проверить текущее положение дрона с помощью прямой видимости, и их следует использовать только для гоночных дронов или других нишевых применений технологии дронов.
Подготовка коптера к первому взлету
Перед первым запуском проверьте включен ли дрон, проконтролировав положение соответствующего переключателя на его корпусе. Затем установите его на горизонтальную поверхности и разово на короткий промежуток времени поднимите левый джойстик вверх (если требование горизонтальности не будет соблюдено, то могут быть сбиты все настройки). Если все в порядке и можно взлетать, то вы услышите короткий однотонный звук.
В случае, когда после активации на пульте управления начал быстро мигать светодиодный индикатора, а на квадрокоптере он мигает очень медленно, то это признак рассинхронизации.
Пескоразбрасывающее оборудование
| Разбрасывающий диск (тарелка) пескотряса не вращается. | Между диском и отражателем попал твердый предмет. | Очистите диск. |
| Недостаточно масла в гидробаке гидросистемы. | Долить гидромасло до верхней отметки. | |
| Появление потеков масла подающей или нагнетательной магистралях. | Ликвидировать течи гидросистемы. | |
| Транспортер пескоразбрасывателя не вращается. | Транспортер застопорен посторонними предметами или замерзшим технологическим материалом. | Удалите посторонние предметы, очистите от технологического материала. |
| Недостаточный уровень масла внутри маслобака. | Долейте масло до требуемого уровня. | |
| Нарушение герметичности во всасывающей или нагнетательной магистралях. | Устраните негерметичность. | |
| Гидровращатель не вращает транспортер, при наличии давления в системе (транспортер и диск не застопорены посторонними предметами). | Вышел из строя гидровращатель. | Замените гидромотор. |
Таким образом, своевременно применяя эти рекомендации, ваша специальная техника будет всегда в боевой готовности!
Как искать дрон

Прежде всего, в ходе полета стоит следить за показаниями системы OSD (если таковая есть) на экране пульта или смартфона. Из них можно узнать последние координаты летательного аппарата, направление его перемещения, пройденное им расстояние и прочую актуальную информацию о полете. Эти данные очень важны и способны существенно помочь в проведении поисковой операции.
Ниже приводится список идей, которые помогут вам ответить на главный вопрос: «Как найти дрон?».
- Во-первых, для поиска можно использовать еще один БПЛА. Такой поисковик должен иметь на борту простейшую камеру и стоить дешевле временно утраченного беспилотника.
- Во-вторых, следует внимательно проверить кроны окружающих деревьев и кустов. Размах лопастей и яркая окраска корпуса дают хорошие шансы обнаружить потерявшуюся машину.
- Если аккумулятор упавшей машины не разрядился окончательно, пилот может заняться поиском огней, присутствующих в полетной зоне. Упавшая машина способна сообщить о себе сигналами бортового освещения.
- Еще одна идея заключается в использовании кнопки RTH на пульте управления. Пилот берет пульт и направляется в предполагаемую зону падения, периодически нажимая на эту кнопку. Если летательный аппарат просто утратил связь с оператором, то эти действия должны помочь.
- И последнее. Никогда не выключайте свой контроллер. Как только вы приблизитесь к БПЛА, ПДУ попробует самостоятельно восстановить соединение с ним. Этот способ является наиболее эффективным и многократно проверенным.
Что делать и как исправить, если квадрокоптер при взлете тянет в сторону
Если при испытании выяснилось, что дрон тянет в сторону, и летит он неровно, необходимо посадить устройство на землю и провести внимательный физический осмотр. Пошаговый алгоритм предлагается следующий:
- Винты квадрокоптера аккуратно прокручивают пальцами. Если один из пропеллеров вращается медленнее других и с ощутимым усилием, необходимо снять его и посмотреть, нет ли загрязнений на оси двигателя.
- Любой налипший мусор, травинки, шерсть и нитки, из-за которых квадрокоптер тянет в сторону, нужно снять. После этого винт устанавливают обратно, при необходимости заворачивая менее плотно, и еще раз прокручивают пальцами. Если он идет свободно, то, скорее всего, коптер в полете перестанет тянуть в сторону.
- Дрон ставят на ровной поверхности и снова пробуют запустить в воздух. Для старых квадрокоптеров механической чистки обычно оказывается достаточно.
Как провести триммирование для квадрокоптера
Если квадрокоптер летит в бок, делать нужно в первую очередь проверку его механической исправности. Но когда отладка винтов не дает результатов, и дрон продолжает тянуть в сторону, остается провести автоматическую калибровку устройства. Выполняют ее по такой схеме:
- На пульте управления коптером находят кнопки или колесики, отвечающие за триммирование.
- Дрон запускают в работу и поднимают устройство в воздух отведением левого стика вниз.
- Набирают небольшую высоту и определяют, в какую именно сторону продолжает тянуть неисправный коптер.
- При наличии крена вправо триммируют дрон влево и наоборот.
- Проводят настройку до тех пор, пока устройство не начнет двигаться совершенно ровно.
Если новый квадрокоптер заваливается в сторону при взлете, для начала можно попробовать просто сбросить заводские установки и провести калибровку гироскопа и акселерометра. Для этого аппарат размещают на ровной поверхности, включают и отводят оба стика сначала вниз и влево, а затем вниз и вправо. Об успешно выполненной настройке коптер сообщит светодиодным или звуковым сигналом.
 Триммеры на пульте дрона обычно расположены возле правого стика
Триммеры на пульте дрона обычно расположены возле правого стика
Почему квадрокоптер тянет в сторону?
Самой распространенной проблемой с дронами остается их нестабильное положение и «увод» в сторону в условиях безветренной погоды. В большинстве случаев проблема решает калибровка и триммирование. Если это не помогает, то проблема может быть более серьезной и нужно проверить следующие моменты:
- правильность подключения;
- корректность направления вращения пропеллеров;
- наличие неисправностей в приводах пропеллеров;
- целостность отдельных элементов, ведущих к разбалансировке коптера.
Достаточно часто причиной проблем становится попытка самостоятельного или неквалифицированного ремонта, что нужно учитывать при техническом обслуживании. Если вы решите калибровать или ремонтировать дрон самостоятельно, то действуйте внимательно и соблюдайте требования инструкций.
Другие вещи, которые нужно проверить
Если простые проверки не сработали, и прохождение всех возможных калибровок не дало результатов, вот последние вещи, которые нужно проверить.
Повреждения
Повреждения внутренних компонентов дрона могут быть неочевидными. Повреждения могут включать трещины и поломки внутренних электронных плат из-за жесткой посадки, а также повреждение водой.
Внешняя оболочка дрона может быть повреждена.
Внешняя оболочка дрона, как правило, пластиковая или композитная, и ее относительно легко сломать, поскольку она изготовлена так, чтобы быть как можно легче. Он не обеспечивает наилучшую защиту от ударов.
Если на внешней стороне вашего дрона имеются явные повреждения в виде треснувшей рамы или переломов руки и корпуса дрона, велика вероятность, что внутренние компоненты дрона также пострадали.
Отправка дрона на ремонт и профессиональная оценка повреждений — единственное, что вы можете сделать для восстановления дрона, если это коммерческий беспилотник с камерой. В противном случае, если ваш дрон является гоночным дроном с видом от первого лица, вы можете поменять компоненты самостоятельно.
Проверьте расположение пропеллеров
Если ваш дрон набирает обороты, но вы не можете заставить его взлететь, проверьте, правильно ли расположены пропеллеры. Это связано с тем, что некоторые двигатели вращаются по часовой стрелке, а другие — против часовой стрелки, что дает вам возможность перемещаться в воздухе и обеспечивает стабильность полета дрона.
Для того чтобы дрон был устойчив в воздухе, пропеллеры имеют определенные опоры, на которые они должны быть установлены. Часто на дронах есть маркеры, по которым ориентируются двигатели. Некоторые следят за тем, чтобы дроны находились в правильных местах расположения пропеллеров.









Страшные случаи
Многие дроны оснащены различными функциями интеллектуального выстрела.
Простым нажатием кнопки можно сделать невероятные снимки. Новейшие дроны DJI и приложение GO4 имеют следующие режимы интеллектуальной съемки полета. Эти режимы позволяют снимать впечатляющие кадры без ручного управления, необходимого для съемки таких кинематографических кадров.
- Ракета: Поднимайтесь вверх с камерой, направленной вниз, держа объект в поле зрения.
- Dronie: Летите назад и вверх, держа камеру на объекте съемки. Я постоянно использую этот способ, в результате чего получаются великолепные снимки практически для всего.
- Круг: Дрон кружит вокруг объекта съемки, держась на фиксированном расстоянии от него (не движется вместе с объектом съемки)
- Геликс: Дрон летит вверх, увеличивая высоту по спирали вокруг объекта съемки.
- Астероид: Дрон летит назад и вверх. Он делает несколько снимков, затем летит к исходной точке. Создается снимок типа «маленькая планета».
- Бумеранг: Дрон летит назад вокруг объекта по овальной траектории, поднимаясь по мере удаления от начальной точки. Затем он опускается, когда летит обратно.
Как только вы активируете эти кадры, остановить их может быть сложно, если вы запаникуете. Дрон будет полагаться на свои датчики и системы визуального позиционирования, чтобы избежать препятствий и не дать дрону потерять управление.
Обратите внимание, однако. Некоторые из этих беспилотников лучше других выполняют такие автоматические съемки в условиях значительно перегруженного воздушного пространства
Если вы собираетесь использовать эти функции автоматической съемки, убедитесь, что вы знаете, где находится «тревожная кнопка» для остановки дрона в воздухе, если вы заметите какие-либо проблемы с безопасностью.
Когда необходима регулировка коптера
Существует ошибочное мнение, что правильно настроенный аппарат не нуждается больше в регулировке. А также, что каждый новый квадрокоптер – настроен правильно. Оба этих утверждения в корне не верны. Конечно, проводить настройку
регуляторов летательного аппарата перед каждым полетом вовсе не обязательно. Но сделать ее необходимо в следующих случаях:
- При покупке нового квадрокоптера – перед его использованием;
- При изменении конфигурации аппарата, замене или установке новых элементов;
- При перемещении GPS-модуля;
- Если у
квадрокоптера нарушена
стабилизация; - После падения или ремонта.
Квалифицированное обслуживание и ремонт квадрокоптеров
Не стоит переживать если ваш квадрокоптер перестал взлетать. При наличии запчастей и специального оборудования это можно исправить. Мастера специализированного сервисного центра готовы проверить ваше устройство и устранить возникшие неполадки. Специалисты, зная особенности каждой модели, способны в короткие сроки восстановить работоспособность прибора.
Ремонтировать дрон своими силами не рекомендуется, так как существует риск получить более серьезные неисправности, которые требуют больших денежных затрат. Доверив свое устройство профессионалам вы получите не только квалифицированный и оперативный ремонт, но и гарантию долгой службы техники.
Источник
Основные проверки
Для идентификации проблемы, нужно выполнить ряд проверок:
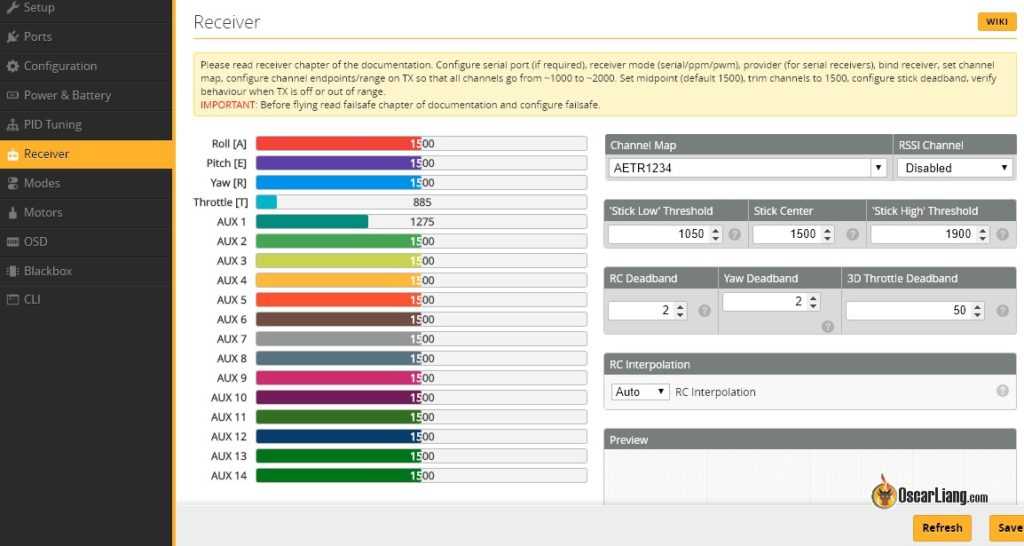
- Проверить, корректно ли работает приемник. Для этого нужно зайти в Betaflight во вкладку «Receiver» и подвигать стики пульта — каждое движение должно правильно отображаться на графике (должны двигаться полоски состояния).
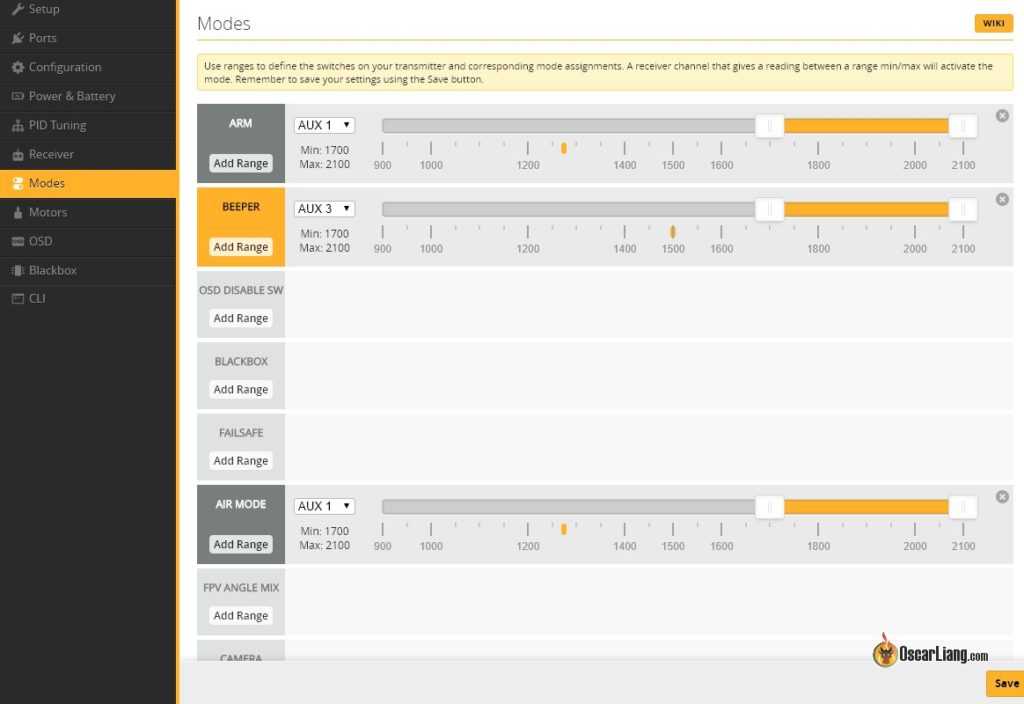
- Проверьте, настроен ли пункт ARM во вкладке Modes, должен быть выбран правильный канал (обычно это AUX1), а желтые ползунки расположены в правой части, определяющие положение переключателя. При перемещении переключателя в положение ON, нижний индикатор должен быть в зоне желтых ползунков.
- Если к дрону подключен USB (к ПК), то будет активна автоматическая защита. Отсоедините USB-кабель.
Если эти пункты проверены, но проблема не решена, то читайте дальше.
Как выявить откалиброван квадрокоптер или нет
Довольно просто: произведите тестовый полет. Если траектория движения квадрокоптера меняется хаотично, значит, ему необходимо триммирование.
Начинается процесс калибровки с проверки джойстиков. Включите пульт управления. Обычно правая часть отвечает за вертикальное управление, левая — горизонтальное. Далее поднимите дрон в воздух, можно на полметра. А теперь попробуйте задать ему направление. Кренит в правую сторону. Проведите регулировку по левому стику. Клонит вниз. Тогда откалибруйте по правому стику.
На данном этапе важно понять, какой настройкой вы будете пользоваться.
Есть два варианта:
- Первый — механическая калибровка. Используется тогда, когда отклонение не очень значительно, и представляет собой подкручивание регулятора тяги.
- Второй вариант — автоматическая калибровка. Применяется при необходимости смещения триммера на 5 и более позиций. Представляет собой настройку работы дрона непосредственно с пульта управления.
Калибровка квадрокоптера и регуляторов скорости моторов ESC
Калибровка летательных аппаратов включает в себя настройку аппаратуры управления, компаса, акселерометра и регуляторов оборотов. В этой статье более подробно рассмотрим калибровку регуляторов скорости двигателей ESC.
Полётные контроллеры регулируют обороты моторов, а электронные регуляторы задают скорость вращения двигателей. В зависимости от сигнала полётного контроллера, регуляторы скорости должны быть настроены так, чтобы определить уровень сигнала по крайним значениям ШИМ.
В зависимости от марки регуляторов производится и их калибровка. Для этого надо внимательно изучить документацию и только после этого приступать к настройке ESC.
Способ калибровки «всех сразу» применим практически ко всем регуляторам оборотов ESC, если настроить этим методом не удастся, необходимо сделать «поочерёдную калибровку моторов».
Калибровка квадрокоптера методом «все сразу»
Перед началом действий проверьте, что все пропеллеры сняты, отсутствует подключение АРМ и компьютера проводом USB и аккумулятор не подсоединён.
- Поставьте стик газа вверх до упора и включите пульт управления.
- Подсоедините батарею, светодиоды начинают мигать АРМ сообщает о готовности.
- Выключите аккумулятор Lipo и вновь подсоедините.
- Начинают поочерёдно зажигаться красный и синий светодиоды — это запущен режим калибровки.
- После музыкального тона сигнала, количеством раз равным числу банок в вашем Lipo и потом ещё двух раз переведите стик газа в нижнее крайнее положение.
- Продолжительный сигнал указывает, что минимум газа определён и режим калибровки заканчивается. Увеличьте газ, проверьте вращение двигателей, двигая стики газа туда и обратно.
- Поставьте стик газа до упора вниз и отсоедините аккумулятор.
Калибровка квадрокоптера методом «поочерёдной настройки ESC»
- Подсоедините один регулятор оборотов к каналу газа.
- Стик газа поднимите до упора и включите пульт управления.
- Соедините аккумулятор с коптером.
- Сначала будет музыкальный тонированный сигнал, затем ещё два сигнала, после них переместите стик газа до конца вниз. Количество сигналов равное числу банок в аккумуляторе и один продолжительный гудок указывают, что процесс калибровки закончился.
- Отсоедините батарею и повторите процесс для каждого следующего регулятора оборотов двигателей ESC.
- Если калибровка не проходит, то, вероятно, канал газа пребывает в инверсии и его требуется настроить.
- Когда во время калибровки возник непрерывный сигнал, уменьшите триммер газа на 50 процентов.
Вот так поэтапно проводится калибровка квадрокоптеров и определяется пригодность их к полётам.
В статье описано как производится калибровка регуляторов. Калибровка необходима для того, чтобы регуляторы «запомнили» уровень минимального и максимального газа и в дальнейшем правильно работали при изменении уровня.








Прежде чем начать процедуру калибровки регуляторов, необходимо убедиться, что процедура была сделана. Если перенастраивали аппаратуру, то эту калибровку необходимо сделать заново.
Если мы провели калибровку аппаратуры и моторы с регуляторами подключили к контроллеру APM согласно типу выбранной рамы, то можно переходить к калибровке регуляторов.
Рассмотрим 2 способа калибровки регуляторов:
- С подключением к контроллеру APM
- Отдельная калибровка каждого регулятора
Перед началом обязательно СНЯТЬ
пропеллеры, отключить
USB от контроллера и отсоединить
аккумулятор.
Возможные неисправности
Кто-то может думать, что существует 159 причин, и сделать все самому нереально. Однако, ремонт и диагностику вполне можно сделать самостоятельно. Причины того, что плохо заводится скутер, можно разделить на несколько категорий:
- Проблемы с зажиганием
- Проблемы с топливом
- Проблемы со стартером
- Проблемы с электрической цепью.
Для полной проверки мопеда следует провести комплексную диагностику, поочередно выполняя проверку каждой из этих категорий.
Проблемы с топливом
В этой категории неисправными могут быть несколько деталей. Самые распространенные поломки – это выход из строя топливного крана, забитый воздушный фильтр или карбюратор.
Топливный кран
У этого элемента системы питания может быть две неисправности: не льется топливо, либо бензин льется не переставая. Диагностируется топливный кран очень просто:
- Снимите шланг подачи топлива с карбюратора и шланг вакуума с крышки головки цилиндра. Потяните ртом воздух в себя через вакуумный шланг, тем самым принудительно создав вакуум. Из шланга подачи должен потечь бензин. Если этого не происходит, следует заменить топливный кран.
- В случае, когда из шланга подачи беспрерывно потечет топливо, следует сразу менять кран.
- Если топливо течет с трудом, тогда замените топливный фильтр или прочистите вакуумный кран.
 В первую очередь следует проверить работоспособность топливного крана
В первую очередь следует проверить работоспособность топливного крана
Карбюратор и воздушный фильтр
Эти два элемента связаны между собой. Попробуйте завести скутер без воздушного фильтра. Если удалось, то меняйте фильтр. Что касается карбюратора, то его необходимо периодически чистить. Особенно учитывая качество бензина на заправках.
 Если воздушный фильтр забился мусором, завести скутер будет невозможно
Если воздушный фильтр забился мусором, завести скутер будет невозможно
Проверить, подается ли топливо в цилиндр, можно, выкрутив свечу и оценив ее состояние. Мокрая свеча свидетельствует о проблемах с переливом или неисправности системы зажигания. Закройте пальцем свечное отверстие и прокрутите вал двигателя кик-стартером. При исправной подаче топлива, на пальце останутся следы бензина.