

Первый полет
Чтобы ваш первый полет не оказался последним для коптера и не обернулся травмой для вас, дадим вам несколько советов.
- Тщательно изучите возможности вашего квадрокоптера и пульта управления. Разберитесь с полетными режимами.
- Летайте только на открытых пространствах вдали от большого скопления людей. Современные квадрокопетры довольно мощные (скорость вращения винтов может превышать 15 000 об/мин) и могут нанести серьезную травму вам и окружающим.
- Не летайте слишком высоко и далеко, есть риск потери сигнала, а, следовательно, и коптера. Рекомендуем настроить решим RTH или Failsafe, в этом случае коптер сможет вернуться домой самостоятельно (при наличие GPS) или самостоятельно приземлиться (если GPS не предусмотрен).
- Не летайте во время сильного ветра, это серьезно усложняет управление квадрокоптером.
- Приобретите маленький комнатный коптер за 20$ и отрабатывайте навыки на нем. На маленьком квадрокоптере можно летать в помещении. Из-за своего веса и размеров такой дрон относительно безопасен.
В завершении несколько видеороликов на тему.
Современные квадрокоптеры способны работать с большим количеством функций и выполнять разнообразные задачи, и одна из наиболее востребованных функций – управление дроном через смартфон или планшет. Причем можно использовать устройства на таких популярных платформах как iOS и Android.
При правильной настройке дрон будет хорошо работать и дистанционно управляться на расстоянии.
Сложность в управлении зависит от такого фактора как характеристики и сложность дрона, ведь на профессиональных квадрокоптерах находиться немало кнопок и тумблеров управления.
А если у вас вполне простой дрон, но имеется необходимость в покупке хорошего пульта для управления? В некоторых случаях такой пульт может оказаться в разы дороже самого устройства. И именно приложение для управления квадрокоптером на Андроид поможет избавиться от лишних трудностей и затрат.

На Андроид также возможно транслировать запись видео и фото, сделанных на коптере при полете. Для настройки и управления полетом придется сказать отдельное приложение.
Среди функций полета доступны следующие:
- выполнение флипов;
- автоматический возврат;
- работа в режиме Follow;
- зависание в воздухе или резкое ускорение.
Также некоторые приложения позволяют не только передавать видео на телефон, но и выводить трансляцию онлайн на канал в Youtube.
Большим преимуществом современных квадрокоптеров считается то, что они адаптированы под программное обеспечение Android и iOS, поэтому теперь не требуется покупать отдельный смартфон под вашу модель дрона.
Но учтите, что программа для управления квадрокоптером может лучше реагировать на управление в зависимости от модели летательного устройства.

Сборка в домашних условиях
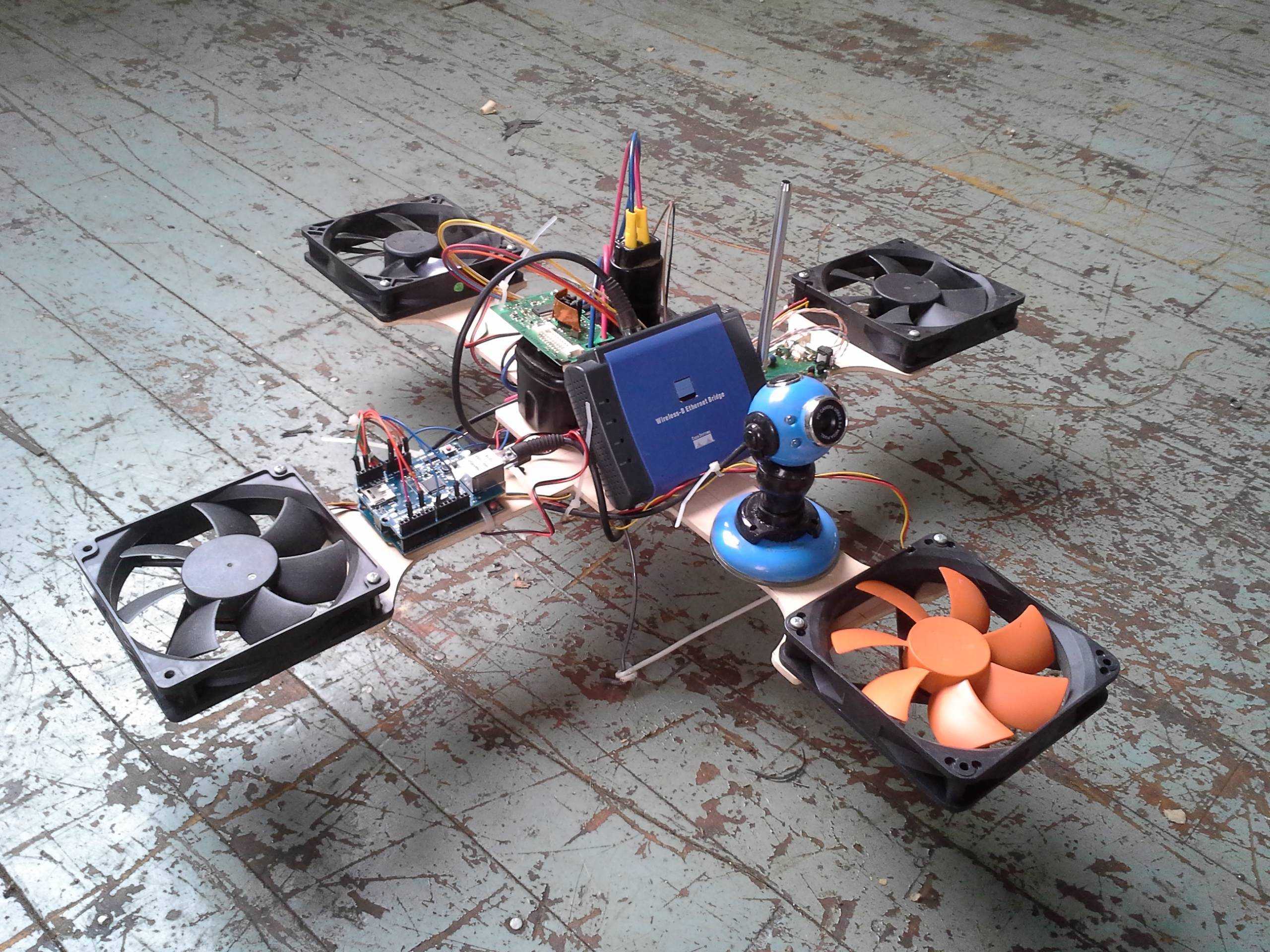
Квадрокоптер можно собрать самому, в домашних условиях. Без покупки сложных электронных компонентов обойтись не получится. А вот силовую раму с ногами двигателей можно сделать из подручных материалов. Есть несколько вариантов сборки. Раму можно сделать из пластиковых труб водопроводной сети или собрать конструкцию из тонкого алюминиевого профиля квадратного сечения.



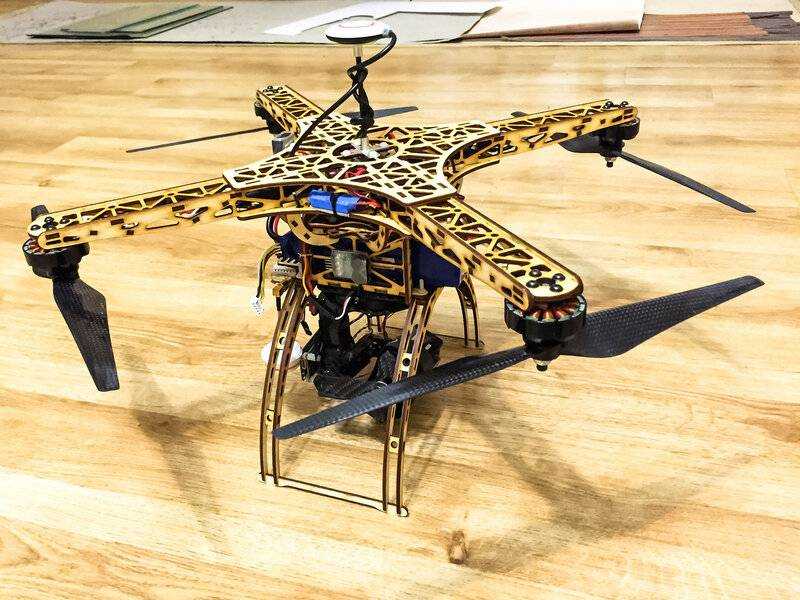
Самый простой способ — выполнить раму из фанеры
. Для этого потребуется квадрат, размеры которого подбираются под габариты будущего коптера. К основанию рамы из фанеры будут крепиться ноги двигателей. Это может быть как готовое изделие промышленного производства, так и вручную изготовленные детали. Пошаговая сборка силовой рамы выглядит следующим образом.
- Делается чертеж конструкции, вид сверху. Соблюдается угол 90 градусов между ногами, равное расстояние между двигателями по диагонали.
- Определяется габарит центральной части из фанеры или профиля, путем разметки необходимых мест крепления ног.
- Если ноги двигателей сделаны из подручных материалов, например, низкого профиля — необходимо предусмотреть надежное место для крепления двигателей.
Сделать всю работу самостоятельно получится только у людей с высоким уровнем навыка моделирования и использования ручных инструментов. Требуется максимальная точность и минимальное количество материала.

Двигатели
Рекомендуется приобретать для сборки коптера в домашних условиях готовый комплект двигателей с системой управления
. Это избавит от возможных отклонений в оборотах и других сложностях балансировки. Если же хочется все собрать самому, включая систему подъемных двигателей, следует ориентироваться на:
- диаметр пропеллеров, который вычисляется по размерам рамы;
- габариты посадочного пространства для двигателя (площадь и высота боковой опоры-стенки).

Далее делается выбор двигателя по его маркировке. Производитель всегда указывает диаметр статора и высоту двигателя. К каждому изделию приводится тип и размер лопастей, рекомендуемых к применению. После этого, основываясь на массе беспилотника и оборотах двигателя при зависании (указывается в паспорте) — подбирается конкретная марка пропеллера.
Выбор лопастей
Лопасти — одна из простых деталей, которым мало уделяют внимания начинающие. От конструкции данного элемента зависят летные характеристики дрона в целом.
Рекомендации по выбору лопастей следующие.
- Если собирается квадрокоптер с камерой, нужно добиться минимальных вибраций при движении. Это позволяют сделать двухлопастные пропеллеры.
-
Трехлопастные пропеллеры
дают больше тяги, но для приведения их в действие требуется большая мощность двигателя.

Второй главный фактор выбора лопастей — материал, из которого они изготовлены. Для начинающих, при сборке первых моделей, можно купить пластиковые пропеллеры
. Но стоит помнить, что они не отличаются прочностью. Пластик деформируется, высыхает (меняет жесткость). Кроме этого, в ходе эксплуатации лопасти повреждаются пылью и другими взвесями в воздухе, из-за чего растет их аэродинамическое сопротивление.

Металлические пропеллеры
— оптимальный выбор, если хочется получить долговечный дрон со стабильными характеристиками. Стоят такие изделия дороже пластика, но служат гораздо дольше, показывая стабильные характеристики. Стоит помнить, что металлические пропеллеры неизбежно потребуют двигатели большей мощности для своего вращения.

Третий тип материалов, используемых для изготовления лопастей — композитные полимеры,
многослойная конструкция. Такие пропеллеры легкие и прочные. Их цена высока, однако в области спортивных дронов композитные материалы лопастей не имеют конкурентов.

Система управления
Система управления, рекомендованная к покупке для начинающих, состоит из пульта и приемника, устанавливаемого на коптере
. Сегодня на рынке представлено великое множество комплектов, предлагающих разный функционал. Например, может быть реализована:


От класса решения напрямую зависит стоимость системы управления. Поэтому рекомендуется тщательно проанализировать сферу применения и задачи коптера перед выбором того или иного комплекта его электроники.
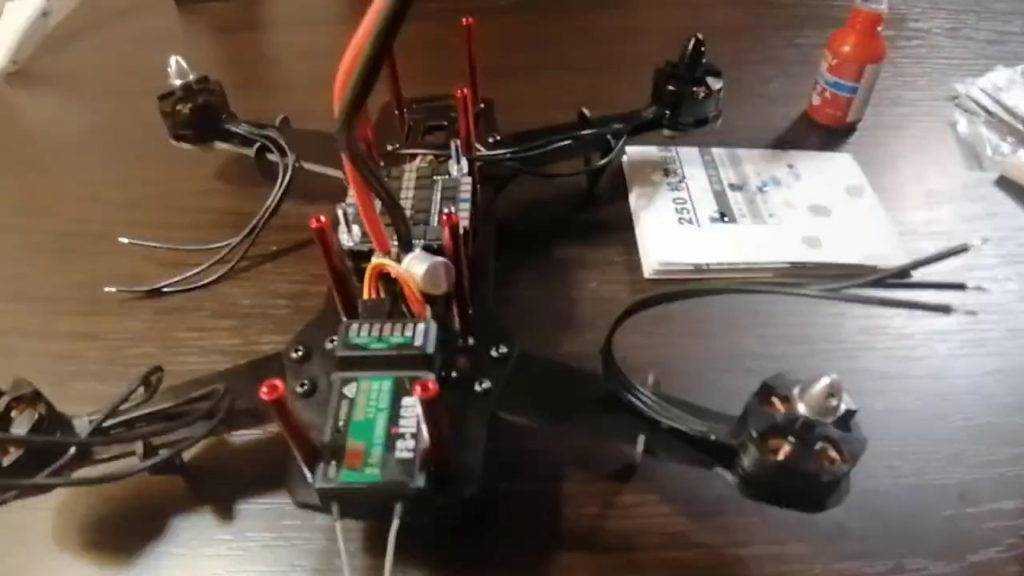
Подключение электроники
Регулятор оборотов iFlight
Теперь займёмся электроникой. Для начала подготовим регулятор оборотов моторов iFlight, четыре в одном. В комплекте к нему есть провод питания с разъёмом XT60 и конденсатор. Всё это нужно припаять к площадками питания на плате регулятора. Не перепутайте полярность. Красный провод – это плюс, а у конденсатора плюс – это длинная ножка. Плюс на плате регулятора отмечен знаком плюса. Конденсатор нужно припаять параллельно питанию.
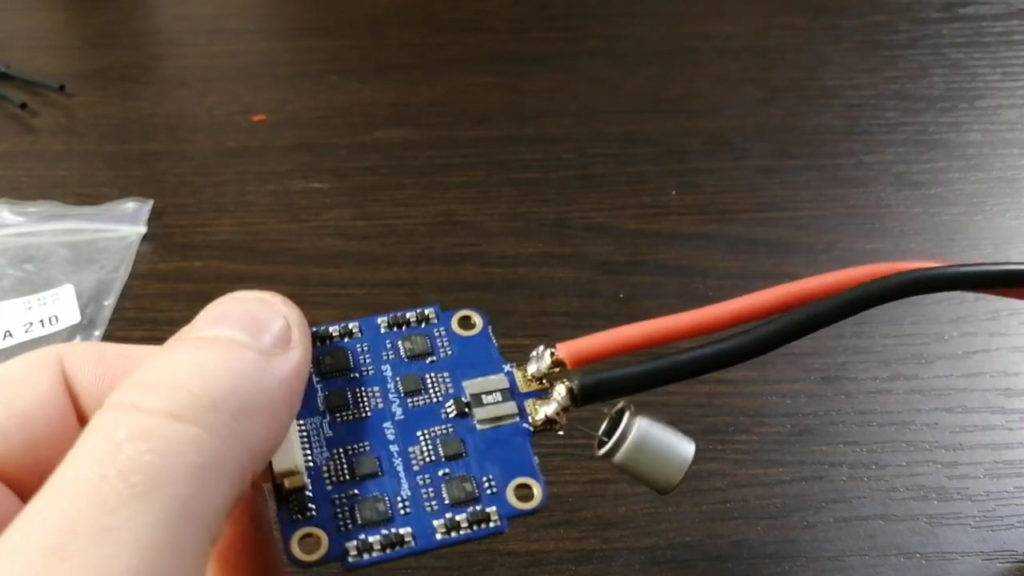 Провода питания и конденсатор припаяны к регулятору оборотов.
Провода питания и конденсатор припаяны к регулятору оборотов.
Приёмник Fly Sky IA6b
Теперь нужно взять один шлейф из комплекта контроллера полётов iFlight SucceX-E F4, тот, который состоит из трёх проводов, и на одном конце имеет трёхпиновый разъем, а на другом четырёхпиновый. Этот шлейф придётся модифицировать для того, чтобы подключить к полётному контроллеру приёмник Fly Sky IA6b.







Кстати, использовать нужно именно такую модель приёмника с буквой B в конце. Без буквы B в названии модели не подойдёт, так как он не поддерживает протокол передачи данных iBus, который необходим для подключения к полётному контроллеру.
От шлейфа отрежьте четырёхпиновый разъём. Потом возьмите сервопривод SG-90 и отрежьте от него разъём с небольшим хвостиком проводов (можно использовать любой трёхпиновый разъём дюпоинт-мама). Затем нужно припаять эти разъёмы друг к другу и сделать новый шлейф. Не перепутайте провода: плюс к плюсу – это красные провода, минус к минусу – обычно это чёрный или коричневый провода, а третий провод сигнальный – обычно они жёлтого или оранжевого цвета. Место пайки обязательно заизолируйте с помощью термоусадки.
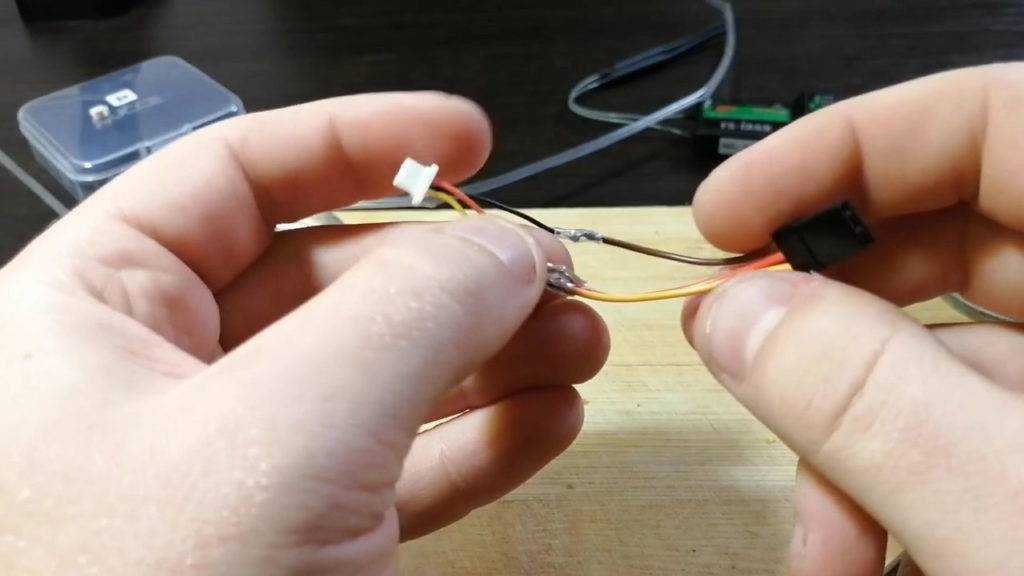 Переделанный шлейф, чтобы подключить приёмник Fly Sky IA6b.
Переделанный шлейф, чтобы подключить приёмник Fly Sky IA6b.
Ниже будет рассмотрено, как приёмник подключается в полётном контроллеру.
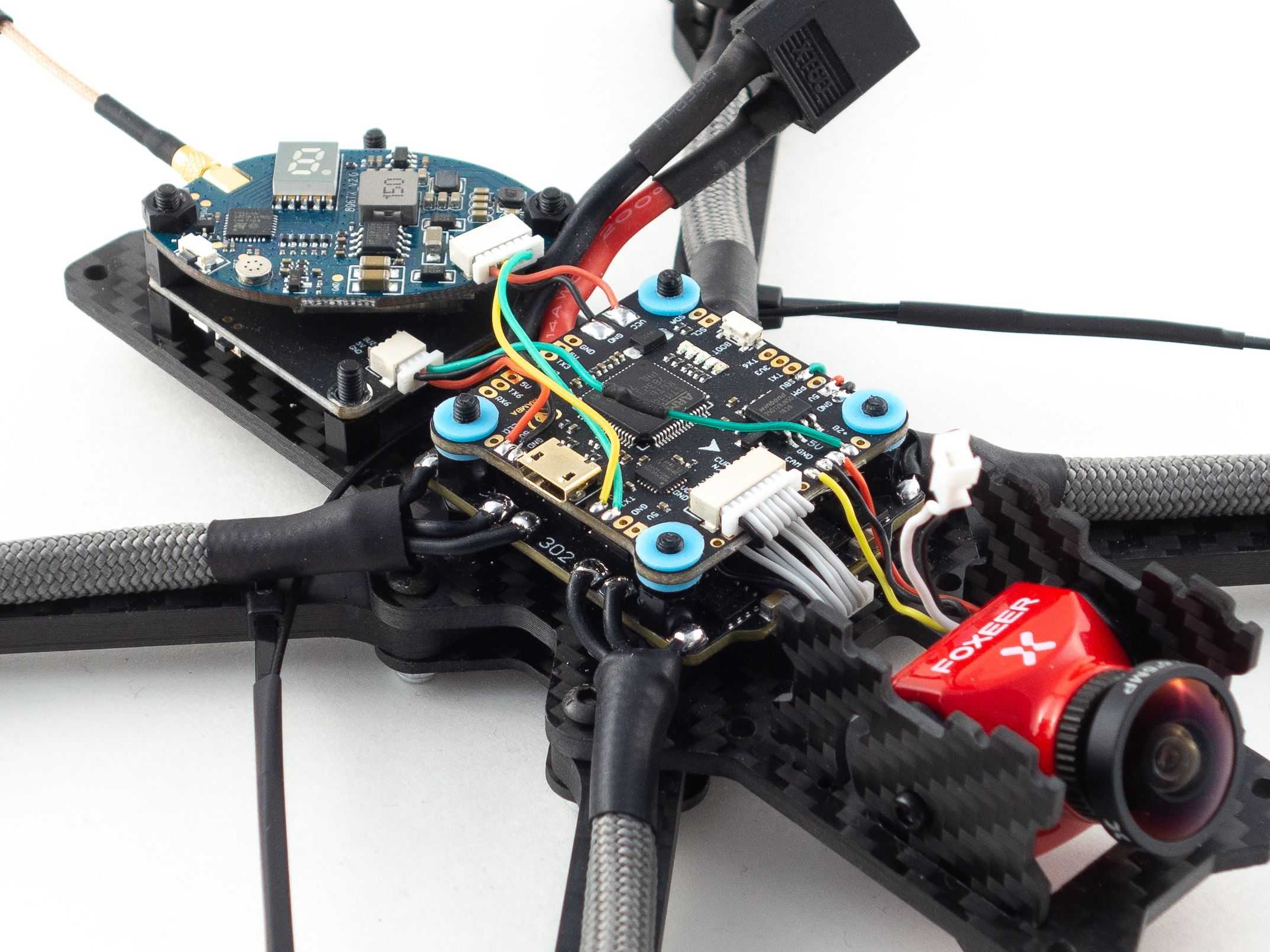
Котроллер полёта iFlight SucceX-E F4
Теперь нужно установить полётный контроллер iFlight SucceX-E F4 на раму. Сначала оденьте на заранее установленные длинные болтики четыре резиновых демпфера из комплекта ПК, затем сверху саму плату ПК, после этого ещё четыре демпфера и сверху плату регулятора оборотов. Скрутите этот стек с помощью четырёх нейлоновых гаек, которые тоже были в комплекте. Демпферы необходимы для гашения вибраций платы, чтобы полёт был более стабильным.
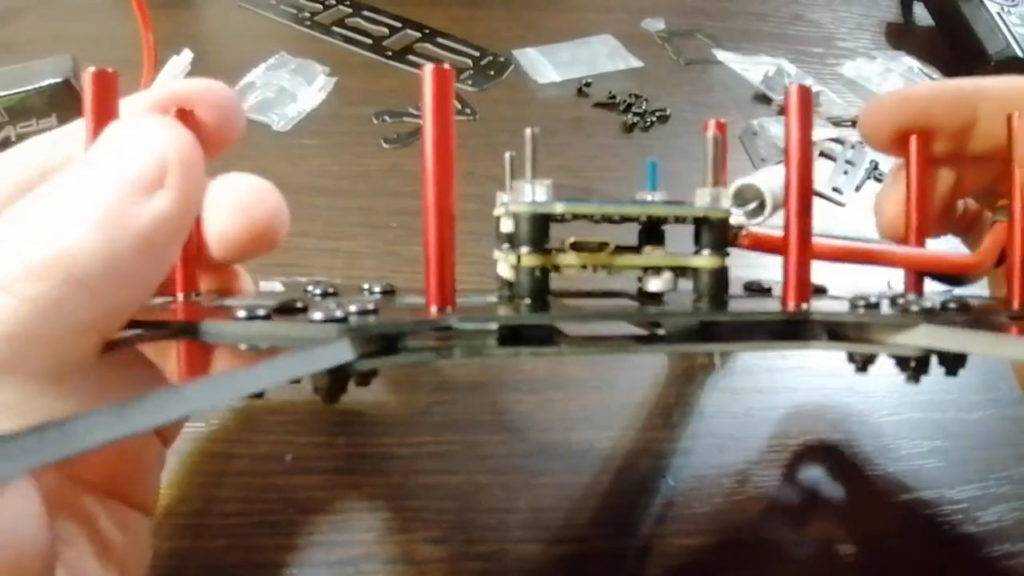 Полётный контроллер и регулятор оборотов установлены на раме.
Полётный контроллер и регулятор оборотов установлены на раме.
С помощью шлейфа нужно соединить полётный контроллер и регулятор оборотов по схеме ниже.
 Разъём для подключения к полётному контроллеру регулятора оборотов.
Разъём для подключения к полётному контроллеру регулятора оборотов.
Теперь подключите шлейф, который спаяли недавно, к полётнику одним концом, и к приёмнику другим. Схема ниже. Подключать нужно по схеме для протокола sBus. Приёмник будет исправно работать при таком подключении, но по iBus.
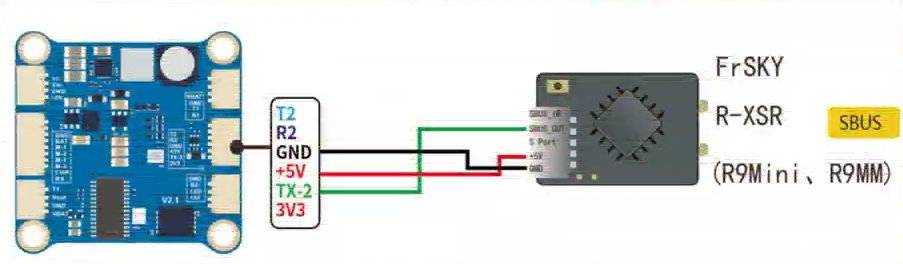 Подключение приёмника к полётному контроллеру.
Подключение приёмника к полётному контроллеру.
На изображении ниже показана распиновка приёмника IA6B. Подключаться нужно к выделенным трём пинам.
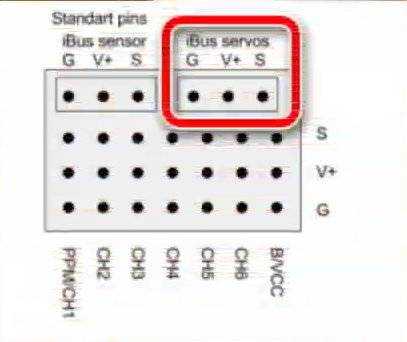 Выделены три пина, к которым нужно подключиться.
Выделены три пина, к которым нужно подключиться.
Приёмник закрепите на раму с помощью двухстороннего скотча.
 Приёмник приклеен на двухсторонний скотч в задней части.
Приёмник приклеен на двухсторонний скотч в задней части.
Моторы DSMX MT2204-2300KV
На лучи нужно установить четыре мотора. Моторы выбраны со скоростью вращения 2 300 оборотов на вольт, с посадочным размером 2204. Я собираю коптер по X-образной схеме, в которой одна пара диагональных моторов вращается в одну сторону, а пара других диагональных в противоположную сторону. Резьба на валу моторов тоже разного направления. Те, которые с белыми гайками – имеют обычную резьбу, а с чёрными гайками – обратную. Установите моторы так, чтобы направление их вращения затягивало гайки. Направление вращения моторов X-образного коптера показано на рисунке.
 Схема X-образного квадрокоптера.
Схема X-образного квадрокоптера.
Моторы прикручиваются к лучам с помощью четырёх болтиков M3 каждый
Обратите внимание, что слишком длинные болты заденут обмотку моторов и испортят её. Болты, которые были в комплекте к моторам идеально подошли. Моторы на лучах рамы
 Моторы на лучах рамы.
Моторы на лучах рамы.
У каждого мотора есть по три провода. Их необходимо припаять к регулятору оборотов. На регуляторе есть маркировка с номером мотора и по три площадки для каждого мотора.
 Моторы припаяны к регулятору оборотов
Моторы припаяны к регулятору оборотов
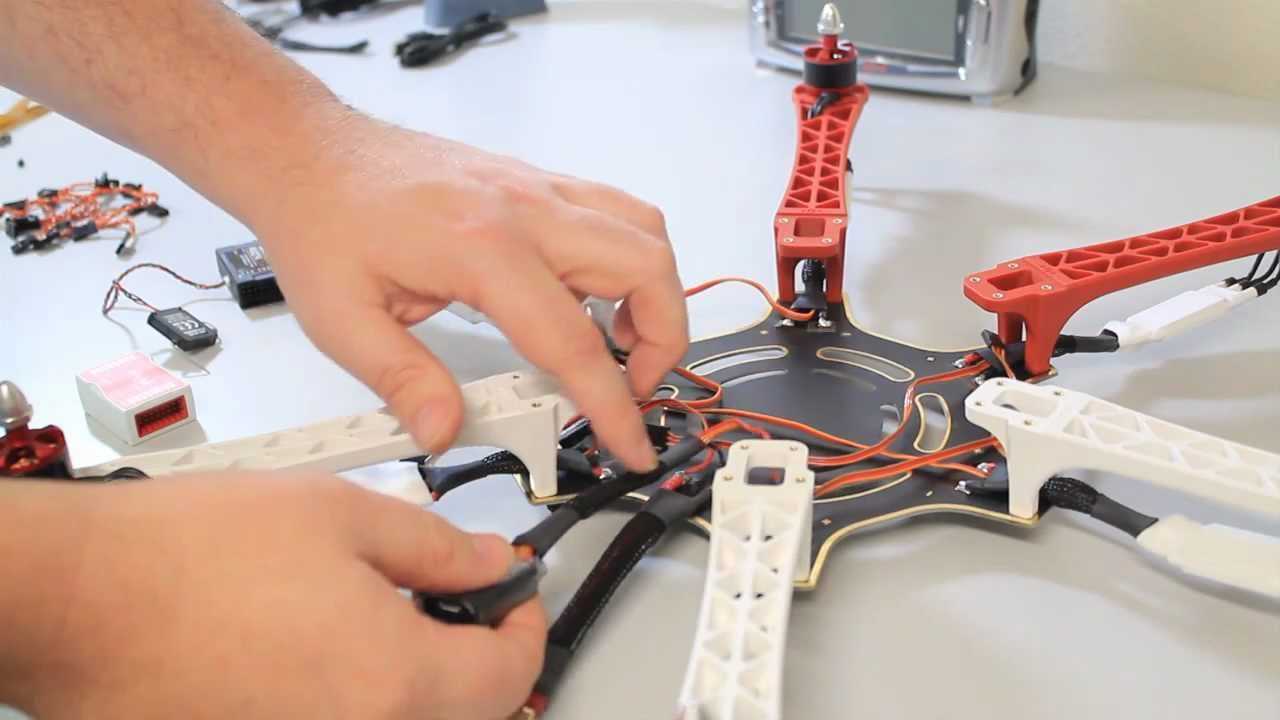
Сборка дрона (квадрокоптера) своими руками
На созданной раме устанавливаются электродвигатели. Возможно, придётся рассчитать местоположения моторов и просверлить в раме отверстия под крепление, если нет иных вариантов.

Затем монтируются контроллеры скорости. Традиционно эти модули устанавливаются на нижней плоскости рамы. Контроллеры скорости через ленточные кабели соединяются непосредственно с двигателями.
Далее на раму добавляется посадочный модуль – часть конструкции, предназначенная для организации «мягкой» посадки дрона. Исполнение этого конструктивного элемента должно предусматривать смягчение ударов при посадке на твёрдую почву. Конструкции возможны разного плана.
На следующем шаге монтируется контроллер полёта. Месторасположение этого модуля не критично. Главное, чтобы обеспечивалась защита электроники и бесперебойная работа.
Полёта дрона соединяется по прилагаемой схеме к модулю (приёмнику) дистанционного пульта управления и к электронной плате регулировки скорости моторов. Все соединения делаются посредством надёжных разъёмов, а наиболее важные точки «садятся» на оловянную пайку.
В принципе, основная сборка на этом завершается. Но спешить закрывать дрон корпусом не стоит. Необходимо протестировать все системы – датчики и другие компоненты квадрокоптера, используя для этого специальный софт OpenPilot GCS (CC3D и GCS). Правда, релиз программы довольно старый и новыми разработками может не поддерживаться.
После теста собранный аппарат – беспилотный квадрокоптер готов к полёту. В дальнейшем дрон несложно модернизировать — оснастить видеокамерой и прочими устройствами, расширяющими функциональность.
Квадрокоптер — это не только весело и интересно. Такое устройство можно использовать для аэрофотографии, доставки небольших грузов, выполнения задач патрулирования, участия в соревнованиях. Именно для последней цели множество профессионалов предпочитает покупать не готовые модели, а собирать квадрокоптер своими руками. Сделать это можно и в домашних условиях. Главное — правильно подобрать комплектующие.
Первое, что стоит уяснить начинающему, который решил сделать квадрокоптер своими руками: обойтись без покупки специальных комплектующих не получится.
Летающая четырехвинтовая машина представляет собой достаточно сложную компьютеризированную систему. Поэтому приобретение специальной управляющей платы, сигналы с которой будут стабилизировать и направлять мультикоптер — является обязательным.
Несколько советов помогут собрать дрон с высокими шансами на положительный результат.
- Не стоит делать самодельный квадрокоптер большим. Разумно начать с надежной, устойчивой и прочной модели.
-
Двигатели для дрона нужно выбирать с запасом
. Во-первых, этим достигается большая свобода при сборке рамы. Мощные двигатели компенсируют ошибки, связанные с недостаточной грузоподъемностью. Во-вторых, характеристики большинства моторов китайского производства завышены. - Минимальное количество проводки и соединений позволит как уменьшить массу, которую будет иметь самодельный дрон, так и минимизировать наводки и потери на сопротивление.
И главное — не стоит сразу пытаться делать квадрокоптер с камерой. Это устройство (если хочется получать качественное изображение) не только громоздкое и довольно тяжелое, но и неизбежно разбалансирует дрон.
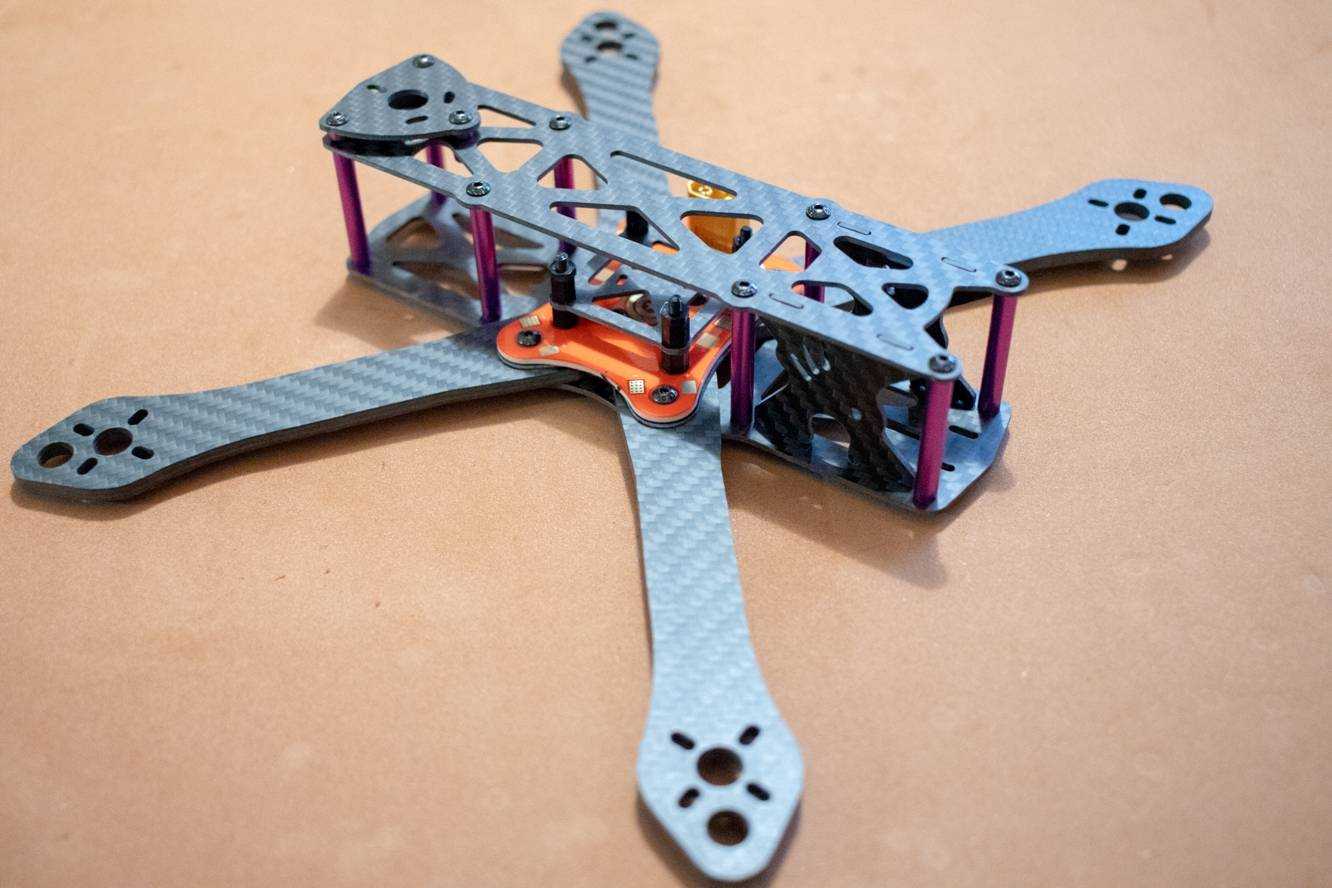
Рама
Основной момент, который нужно решить при выборе рамы, — будешь ли ты использовать готовую раму или же делать ее сам. С готовой рамой все проще, да и заказывать в любом случае придется множество деталей. При этом, учитывая цены в китайских магазинах, самодельный вариант может оказаться дороже. С другой стороны, собственную раму в случае аварии будет проще починить. Ну и, естественно, своими руками можно сделать любую, даже самую сумасшедшую конструкцию. Рассмотрим поподробнее самосборный вариант.
Сделать раму можно из любых подручных материалов (дерево, алюминий, пластик и так далее). Можно подойти чуть серьезнее и выпилить ее на ЧПУ-станке из плетеного карбона, причем можно усложнить задачу и сделать складную конструкцию.
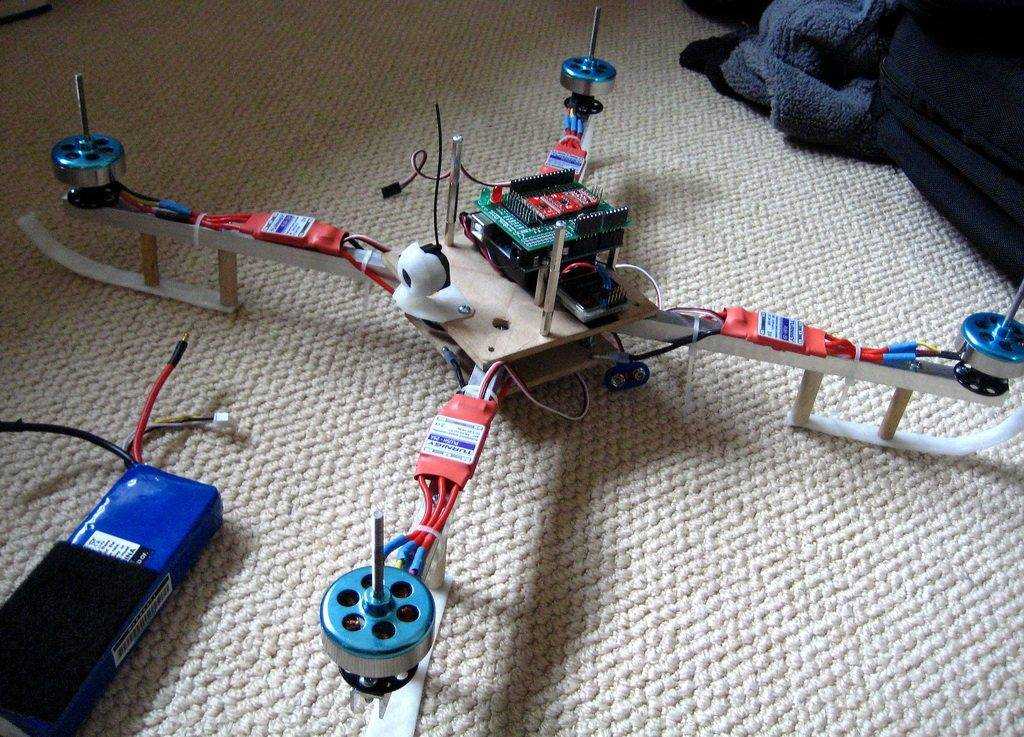








Самый простой вариант для любителей DIY — пойти в OBI, «Леруа Мерлен» или на строительный рынок и купить квадратную алюминиевую трубу 12 × 12, а также алюминиевый лист толщиной в 1,5 мм. Для того чтобы сделать раму из таких материалов типа «четыре палки и крепеж», достаточно дрели или ножовки по металлу. Но нужно быть готовым к тому, что такая конструкция прослужит недолго. Все-таки все эти профили делают из очень мягкого материала (АД31/АД33), при полетах он будет легко гнуться.
Oehmichen № 2, пилотируемый квадрокоптер французского инженере Этьена Омишена, запущенный в 1922 году
В качестве образца для твоей рамы можно взять упрощенную заводскую раму или же найти в интернете готовый чертеж. Более сложные материалы (например, углепластик) можно заменить на алюминий — если и получится тяжелее, то ненамного
В любом случае стоит обращать внимание на длину и симметричность лучей. Длина лучей выбирается исходя из диаметра используемых пропеллеров, так, чтобы после их установки расстояние между окружностями вращающихся винтов было не менее 1–2 см, и уж тем более эти окружности не должны пересекаться
Моторы, устанавливаемые на лучах, должны быть равноудалены от центра рамы, где будет располагаться «мозг», и (в большинстве случаев) находиться на одном расстоянии друг от друга, образуя равносторонний многоугольник.
При проектировании стоит учесть, что центр рамы должен совпадать с центром тяжести, поэтому установить аккумулятор сзади между лучами — плохая идея, если он не будет скомпенсирован грузом спереди, например камерой. Продумай, на что будет приземляться твой аппарат, для новичков можно посоветовать приспособить что-то мягкое на «пузе» или концах лучей, например плотный поролон или теннисные мячики. А также защити аккумулятор на случай неудачного приземления, например установи его между пластинами рамы или расположи под высокими посадочными лыжами.
Что стоит учесть при подборе всех запчастей
Исходя из предполагаемого веса полной конструкции уже FPV-квадрокоптера с камерой, следует собрать коптер с мощными моторами. Отсюда вытекает приобретение дополнительных аккумуляторов или установка сразу более ёмких.
Для облегчения конструкции раму можно сделать самостоятельно. Варианты есть: начиная от простых деревянных линеек, заканчивая алюминиевым профилем или трубками. На этом можно сэкономить. Главное, чтобы материал был прочный, так как при падении первое, что страдает — лучи коптера.
Конечно, есть уже готовые рамы, но следует остерегаться подделок, иначе после первого же краш-теста отлетит минимум одна «нога». На время навыка управления выигрышнее подручные материалы.
Лучи для квадрокоптера имеют оптимальный параметр — 30-60 см в длину от мотора до мотора.
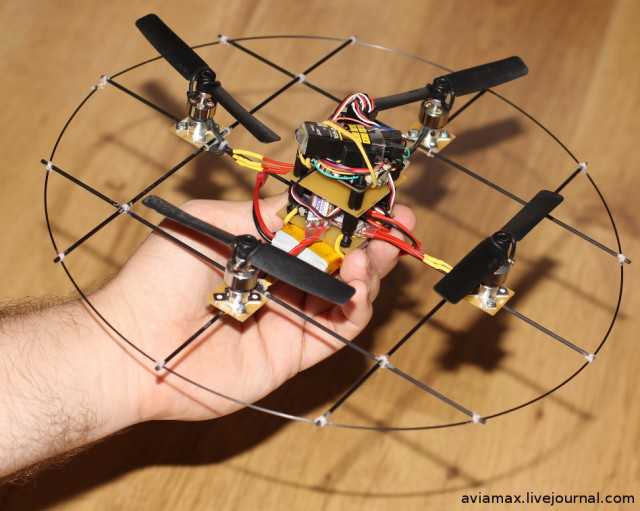
Чтобы не пораниться и не косить листву ближайших деревьев, а также для тестирования коптера в домашних условиях на пропеллеры можно поставить специальную защиту.
К чему будет крепиться контроллер полёта и все остальные примочки? Здесь тоже можно включить фантазию. Конечно, картонка не подойдёт, но квадрат фанеры, пластиковое основание из-под бокса для CD-дисков — оптимально. Не тяжёлое и выдержит всё то, что требуется нацепить.

Если в перспективе использование экшн-камеры, следует оставить место для приёмника и передатчика сигнала камеры на планшет и место для ее крепежа.
Моторы — их нужно сразу четыре. Для пропеллеров в основном подбираются по диаметру и мощности. Диаметр берётся от параметров рамы (если та самодельная, то на своё усмотрение).
Контроллеры управления двигателями нужны для регулировки скорости вращения лопастями. Мощность двигателей напрямую зависит от веса дрона в сборе.
Сами винты можно взять 9-12 см. Пара обыкновенных и 2 с обратным вращением. Желательно, чтобы к ним в комплекте шли крепежи сразу на несколько видов моторов.
Самое главное и самое затратное в quatrocopter — это его «мозги», а именно, контроллер полёта — на нём нельзя экономить. Здесь следует учитывать будущие возможности беспилотника. Микроконтроллер лучше брать программируемый (например, Arduino Mega). Датчики к нему можно взять «всё в одном» All In One (гироскоп, акселерометр, барометр, магнитометр), или по минимуму — гироскоп и акселерометр.
Дополнительные функции:
- GPS — программирование маршрута полёта;
- «мягкая посадка» — fail safe (если радиосвязь с пультом потеряется, то коптер плавно сядет, а не рухнет на землю);
- FPV (first person view) — вид от первого лица, а наблюдение из планшета.
Передатчик на управляющую плату стоит подбирать по карману. Главное, чтобы было не менее четырёх каналов и частота 2,4 ГГц. Его можно купить для левши или правши.
С проводами, конечно, придётся повозиться, но в умелых руках это время пройдёт быстро.
На ножки коптера или на сами лучи на раме лучше прикрепить специальную мягкую подкладку, чтобы на твёрдых поверхностях посадка была легче.
Легко не будет, но будет интересно и занимательно!
Список основных деталей
- Рама
- Электромоторы 4 шт.
- ESC или электронный регулятор скорости 4 шт.
- Плата управления
- Радио передатчик и приемник сигнала
- Лопасти 4 шт. (2 — для вращения по часовой стрелке и 2 — против часовой)
- Батарея и зарядное устройство для нее
Кроме того вам понадобятся всякие мелкие запчасти, материалы такие как хомуты, двусторонний скотч, проволока, держалка для батареи, перемычки, болтики и т.п., но обо всем по порядку. Нужны будут еще и кое какие инструменты. У вас должен быть паяльник с не сильно толстым жалом и вы должны уметь им пользоваться, отвертка, шестигранные ключи, плоскогубцы, клей или лучше клеевой пистолет. А теперь мы пробежимся подробно по каждой детали в отдельности и дадим уже более конкретные советы.
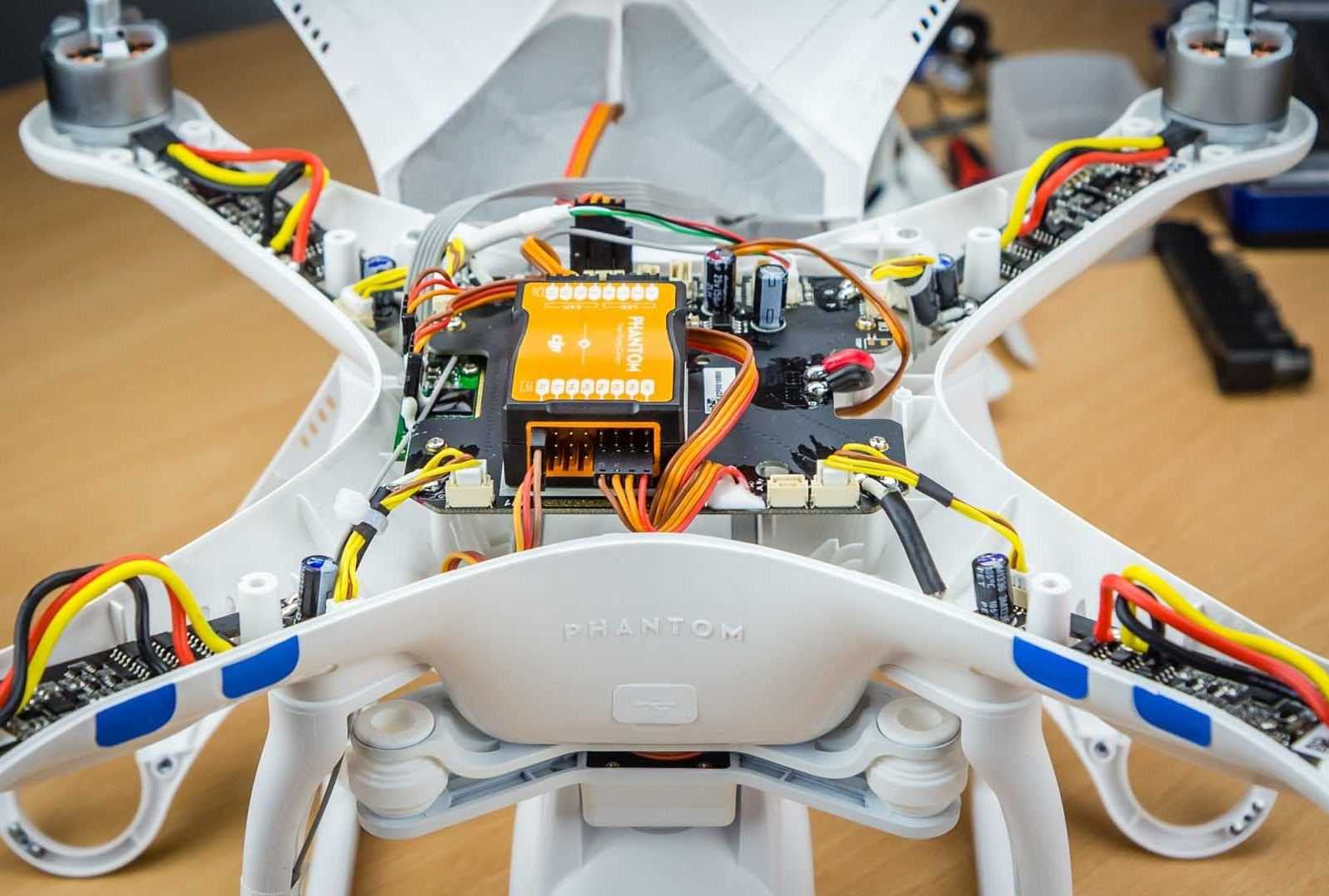
В принципе любой летательный аппарат должен иметь в своей основе раму, а если говорить о квадрокоптерах, тот тут это очень критично. При выборе рамы нужно рассматривать три ее характеристики: вес, размер и материал, из которого она изготовлена. Мы рекомендуем использовать DJI FlameWheel F450 или что-то аналогичное. Рама эта сборная и цена ей порядка 20$ (аналоги в районе 15$). Она прочная, легкая и в ней уже есть PBN (распределительная плата), на которой все можно аккуратно и легко собрать. Так же к ней подходит целая куча разнообразных дополнительный прибамбасов. Если для вас дороговато покупать раму от DJI, то можно найти ее аналог (клон), он будет дешевле, а по качеству мало чем отличаться. Все запчасти и аксессуары 100% совместимы между собой. Размах крыльев у такого квадрокоптера в итоге будет более 50 см. Достаточно внушительный аппарат получится.
Электромоторы
Для чего нам нужны моторы? А для того чтобы крутить пропеллеры, которые и поднимут нашу птичку в воздух. В интернете можно найти тысячи разнообразных моторов для квадрокоптера от абсолютно дешевых до заметно дорогих. Комплект из 4-х достойных моторов стоит примерно 30$, но можно конечно найти и гораздо дешевле. Моторы отличаются по мощности, которая указывается в кВт и чем она больше, тем быстрее он будет вращать свой пропеллер при постоянном напряжении. При покупке электромотора посмотрите обязательно на то, сколько силы тока в амперах нужно будет иметь на ESC и какой размер лопастей оптимален для данного экземпляра двигателя. Мы советуем начинать с мощности электромотора в 1000 кВт
Так же обратите внимание на тип моторов, они могут быть коллекторными (brushed) и бесколлекторными (brushless). Последние предпочтительнее, т.к
они быстрее, тише, надежнее, проработают гораздо дольше.
Батарея
На такие летательные аппараты как квадрокоптер устанавливаются чаще всего аккумуляторные батареи типа LiPo. Они могут быть разного размера и емкости. Мы используем батареи типа 3S1P, что означает 3 ячейки соединенных параллельно. Каждая ячейка дает напряжение 3,7В, итоговое напряжение на выходе 11,1В. Так же у каждой аккумуляторной батареи есть показатель C, который говорит о том, сколько тока она может отдать (её токоотдача), измеряемая в Амперах. И емкость батареи, измеряемая в амперЧасах. И тут есть прямая зависимость между мощностью (емкостью) батареи и её весом, так что тут нужно найти золотую середину между продолжительностью полетом и общим весом летательного аппарата. Главное правило — удваивая емкость батареи вы получаете лишь +50% к времени полета, но еще нужно учесть сможет ли ваш квадрокоптер поднять в воздух такой вес. Для нашей сегодняшней модели мы рекомендуем брать аккумуляторную батарею с емкостью 3000 мАч. Цена будет что-то около 15$.
Купить или сделать?
Решение сделать коптер самим может быть определёно, так называемым, спортивным интересом, а может быть связано и с желанием сэкономить
И в первом, и во втором случае важно взвесить все «за» и «против», а также определить сильные и слабые стороны в самостоятельной сборке
Время
Как было сказано выше, основным минусом дрона «Сделай Сам» может стать время. Ведь одно дело -заказать готовый к полёту квадр, подождать одну-две недели и использовать его в своё удовольствие. А вот в самостоятельной сборке есть целый ряд нюансов, которые могут повлиять на сроки:
- Приобретение всех необходимых запчастей, которые не всегда могут попасть к вам в руки одновременно.
- Время потребуется и на изучение технической части, чтобы ясно понимать из чего состоит и как работает дрон.
- Сама сборка и настройка полётного контроллера потребует времени и, конечно, терпения.
- Постсборка, которая означает не только тестирование, но работу над ошибками и «переделками», что также занимает много времени и сил.
Опыт
Компенсировать первый пункт во многом сможет наличием опыта в самостоятельной сборке радиоуправляемых устройств. К тому же, если вы собираете дрон при наличии «заводской» модели, то это может стать наглядным пособием для изучения «начинки» квадра. А вот для тех, кто первый раз сталкивается с такой сборкой, есть два варианта:
 А) Приобрести самую недорогую модель квадрокоптера, которая не только послужит образцом, но и чьи детали можно позаимствовать для своего коптера;
А) Приобрести самую недорогую модель квадрокоптера, которая не только послужит образцом, но и чьи детали можно позаимствовать для своего коптера;
Б) Обратиться за помощью на форумы и специализированные сайты, где можно почерпнуть всю информацию, а также подробно прочитать о пошаговой сборке коптера с указанием наименований всех необходимых деталей.
Стоимость
Многие решают собрать квадрокоптер из расчёта, что такое устройство обойдётся дешевле покупного. Но здесь следует помнить о некоторых особенностях:
- Конечно, если вы ставите цель собрать квадрик из подручных средств с минимальными затратами, то проблем не возникнет, так как можно приобрести все комплектующие из одного ценового диапазона. Но тут нужно понимать, что создать мощное устройство с высокой грузоподъемностью вам не удастся.
- Если же вы делаете ставку на характеристики квадрокптера, а не на простую возможность взлетать и парить в воздухе несколько минут, то здесь вы вряд ли добьетесь существенной разницы между покупным и самодельным коптером. Хотя, конечно, возможность сохранить 10-20% от стоимости всё же будет.
Самостоятельная сборка квадро-, гекса- или трикоптера — это возможность попробовать себя в роли инженера и механика, позволяющая создать уникальную модель с теми характеристиками, которые для вас являются наиболее актуальными. Но питать надежды, что это более простой и дешёвый путь, чем покупка готового устройства, всё же не стоит.








Настройка квадрокоптера
Настройка квадрокоптера требует изучения инструкции, просто подключить и полететь не получится. Необходимо загрузить ПО для «мозга» квадрокоптера с сайта, выбрать конфигурацию квадрокоптера, настроить параметры и залить все это по USB в плату управления.
Тут лучше всего обраться к профессионалам, прочитать форум по квадрокоптерам или попросить настроить того, кто уже разбирался с подобной настройкой.
https://youtube.com/watch?v=By8Uup1TiN0
Дело в том, что прошивки выпускаются достаточно часто, а каждая прошивка весьма сильно отличается от предыдущей. Так что рассказывать как настраивать на текущей особого смысла не имеет.
Студенты сделали беспилотник
Первыми задачами студенческого конструкторского бюро является развитие научно-технического творчества студентов и молодежи. Студенты конструируют не только сами схемы, но и их начинку, то есть те мозги, которые являются интеллектуальной начинкой всех этих технических систем. В этом видео представили самодельный летательный аппарат — беспилотник.
В СКБ долгое время разрабатывалось система передачи информации на большие расстояния, это 300-400 км. Хотим управлять этим беспилотником на расстоянии 300 км. Что для этого делаем? Поднимаем еще несколько беспилотников между ними, и они осуществляют ретрансляцию сигналов, то есть для решения этой задачи были разработано специальное оборудование, которое протестировали на этом беспилотном летальном аппарате. Вы видите антенну, которая осуществляет прием и передачу информации. Внутри автопилот, который удерживает самолет по определенному курсу. Был разработан беспилотный летательный аппарат, но по форме напоминающий летающую бочку или ведро втулку. Он имеет профиль крыла, внутри устанавливается двигатель и пропеллер. Рули, которыми осуществляем стабилизацию во время полета. Когда не нужно зависать на месте, а передислоцироваться быстро, он может ложиться на крыло и по сути летит как реактивная бочка. За счет того что винт защищен вы можете допустим спокойно с помощью этого устройства осматривать здания.
Инициатором построения квадрокоптеров был студент первого курса Павел Сидоренко, он строил квадрокоптеры разных схем и отрабатывал систему пилотирования. Встал вопрос о квадрокоптере для реального применения, например для аэро фото, и кино съемки. Сейчас он имеет настроенный автопилот и систему аэро- кино- съемки. Он ориентируется по GPS навигатору, прокладывает свой маршрут и может вернуться в точку вылета. Съемка пейзажей, строений, кадастровые объекты можно фотографировать. Также наблюдения за территориями можно проводить с помощью этого аппарата. Ну и военные структуры. Например, охрана границ, каких-то складов.
На базе СКД делаем 3D-принтеры, печатать он может подобные пластиковые детали, достаточно сложные по конструкции. Прелесть еще данной технологии то, что она в свободном доступе, как Linux система. То есть любой желающий может взять исходники и на свое усмотрение дорабатывать. Доработками делиться с сообществом. Делается деталь в 3D-редакторе, потом соответственно добавляется в специальную программу, которая разбивает 3D-модели на слои, принтер по командам программы наносит слой за слоем. Все, что можно смоделировать, можно напечатать.
Тема мобильных ретрансляторов. В СКБ была разработана еще специфическая вещь, похожая на летающую тарелку. Мобильный ретранслятор, который поднимается в воздух в быстрые воздушные слои 15-20 км и там зависает. Сверху ретранслятор будет обклеен солнечными батареями.
Самодельная летающая тарелка

Чтобы летающая тарелка оставалась на месте, приготовлены ушки, они расположатся по краям.
Как собрать квадрокоптер своими руками
Предупреждаем, что инструкция обобщена и что могут быть различия в паре моментов. Мы расскажем основное по поводу сборки и выбора деталей.
Какие нужны детали
Рама и её составляющие.
Главное в коптере – несущая часть. Если рама будет легче, то меньше будет уходить питания. Но учтите — лёгкие рамы стоят дороже. Прочность не так важна, если вы не планируете ставить на коптер камеру потяжелее. Рамы бывают трёх типов: четырёхлучевые, шестилучевые и восьмилучевые (по одному мотору на каждый луч).
Особенности выбора комплектующих
Экшн-камера Xiaomi Yi

Цена на AliExpress:
US $49.99 — 109.99
Технические характеристики:
- Сенсор: CMOS 1/2,3″ 16 мегапикселей;
- Объектив: f/2.8, угол обзора 155 градусов;
- Видео: 1920×1080, 60fps;
- Фото: 4608×3456;
- Вес: 72 грамма;
- Time Lapse: есть;
- Встроенный экран: нет;
- Память: карта памяти microSD.
SJCAM SJ5000X 2K

Цена на AliExpress:
$126.58
Технические характеристики:
- Сенсор: CMOS 12 мегапикселей;
- Объектив: f/2.8, угол обзора 170 градусов;
- Видео: 2560×1440, 30fps;
- Фото: 4032×3024;
- Вес: 74 грамма;
- Time Lapse: есть;
- Встроенный экран: есть;
- Память: карта памяти microSD.
Конечно, не стоит недооценивать китайских производителей, но и расхваливать тоже не нужно. Завышенная характеристика их товаров – обычное дело. Брать можно, но только не дешёвые детали, иначе придётся делать всё заново.